流体力学核心贯通课 II
2025–2026 学年第二学期
北京理工大学 空天科学与技术学院
任杰
TWO-DIMENSIONAL SUPERSONIC FLOW
Prandtl–Meyer 膨胀波
本章讨论二维无粘超声流绕过膨胀角的数值求解。
核心思想是:利用超声流的下游推进特性,将二维定常问题转化为沿流向逐步推进的计算过程。
Prandtl–Meyer expansion · Downstream marching · Boundary-fitted coordinates
二维超声流动的数值解
参考书
- John D. Anderson Computational Fluid Dynamics:
The Basics with Applications
McGraw-Hill, 1995 - Chapter 8
真正理解 CFD 的最好方式,是自己实现数值算法并运行计算 - John D. Anderson
膨胀折角算例
本章研究的问题是:
二维、无粘、超声流绕过一个 膨胀角 时形成的 Prandtl–Meyer 膨胀波。
选择该问题的原因:
- 有明确的物理图像
- 存在解析解,可用于验证CFD结果
- 可采用二维超声流中的空间推进策略
- 贴体坐标变换
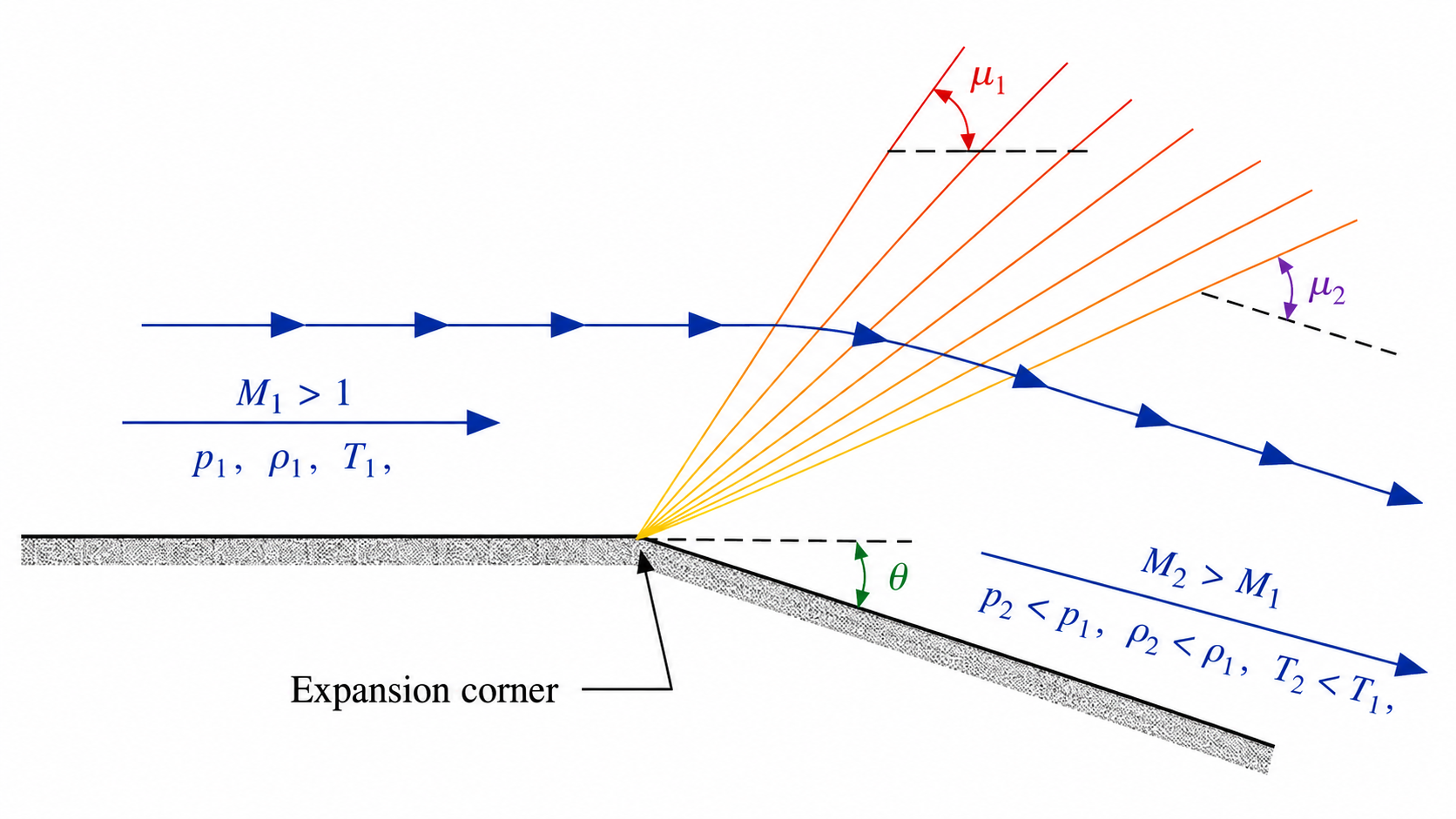
图示:中心 Prandtl–Meyer 膨胀波
Prandtl–Meyer 膨胀波 ❶ 物理图像
当超声来流绕过一个外凸转角时,流动发生膨胀。
膨胀波可看作由无穷多条 无限弱 Mach 波 组成的扇形波系。
膨胀波前后:
- 流动方向转过角度 \(\theta\)
- 马赫数增大:\(M_2>M_1\)
- 压强、密度、温度降低:\(p_2<p_1,\;\rho_2<\rho_1,\;T_2<T_1\)
Prandtl–Meyer 膨胀波 ❷ Mach 角
膨胀扇的前缘和后缘分别对应上游和下游状态的 Mach 角。
上游 Mach 角:
\[ \mu_1=\sin^{-1}\frac{1}{M_1} \]
下游 Mach 角:
\[ \mu_2=\sin^{-1}\frac{1}{M_2} \]
因为膨胀后 \(M_2>M_1\),所以 \(\mu_2<\mu_1\)。
Prandtl–Meyer 膨胀波 ❸ 解析关系
对量热完全气体,Prandtl–Meyer 函数为:
\[ f(M)= \sqrt{\frac{\gamma+1}{\gamma-1}} \tan^{-1} \sqrt{\frac{\gamma-1}{\gamma+1}(M^2-1)} -\tan^{-1}\sqrt{M^2-1} \]
膨胀波前后满足:
\[ \colorbox{yellow}{$\displaystyle \color{black}{ f_2=f_1+\theta } $} \]
计算流程:
\[ M_1\rightarrow f_1\rightarrow f_2=f_1+\theta\rightarrow M_2 \]
其中 \(M_2\) 需要由 Prandtl–Meyer 函数反求得到。
Prandtl–Meyer 膨胀波 ❹ 波后状态
得到 \(M_2\) 后,可由等熵关系计算波后热力学状态。
压力:
\[ p_2=p_1 \left( \frac{ 1+\frac{\gamma-1}{2}M_1^2 }{ 1+\frac{\gamma-1}{2}M_2^2 } \right)^{\gamma/(\gamma-1)} \]
温度:
\[ T_2=T_1 \left( \frac{ 1+\frac{\gamma-1}{2}M_1^2 }{ 1+\frac{\gamma-1}{2}M_2^2 } \right) \]
密度由状态方程给出:
\[ \rho_2=\frac{p_2}{RT_2} \]
解析解的作用
本章数值计算需正确捕捉:
- 膨胀波扇区
- 流动转向
- 马赫数增加
- 压强、温度、密度降低
- 空间推进过程中的边界影响
Prandtl–Meyer 膨胀波流场的数值求解
NUMERICAL SOLUTION
空间推进法
对于定常超声流,所有特征信息总体向下游传播。
因此,可以从初始数据线出发,沿 \(x\)
方向逐步推进计算。
MacCormack predictor–corrector · Space marching
控制方程 ❶ 守恒形式
二维定常无粘 Euler 方程可写成强守恒形式:
\[ \frac{\partial F}{\partial x} =J-\frac{\partial G}{\partial y} \]
本问题为等熵、绝热、无体力流动,因此:
\[ J=0 \]
于是控制方程化为:
\[ \colorbox{yellow}{$\displaystyle \color{black}{ \frac{\partial F}{\partial x} =-\frac{\partial G}{\partial y} } $} \]
这里的关键是:
方程左端只含一个 \(x\)
方向导数,因此可以沿 \(x\)
方向进行下游推进。
控制方程 ❷ 通量向量 \(F\)
\(x\) 方向通量向量为:
\[ F= \begin{Bmatrix} \rho u\\ \rho u^2+p\\ \rho uv\\ \rho u\left(e+\frac{V^2}{2}\right)+pu \end{Bmatrix} \]
其中:
\[ V^2=u^2+v^2 \]
将其元素记为:
\[ F_1=\rho u, \qquad F_2=\rho u^2+p \]
\[ F_3=\rho uv,\qquad F_4=\rho u\left(e+\frac{u^2+v^2}{2}\right)+pu \]
控制方程 ❸ 通量向量 \(G\)
\(y\) 方向通量向量为:
\[ G= \begin{Bmatrix} \rho v\\ \rho uv\\ \rho v^2+p\\ \rho v\left(e+\frac{V^2}{2}\right)+pv \end{Bmatrix} \]
将其元素记为:
\[ G_1=\rho v \]
\[ G_2=\rho uv \]
\[ G_3=\rho v^2+p \]
\[ G_4=\rho v\left(e+\frac{u^2+v^2}{2}\right)+pv \]
通量形式的整理
对量热完全气体:
\[ e=c_vT=\frac{RT}{\gamma-1} =\frac{1}{\gamma-1}\frac{p}{\rho} \]
因此,\(F_4\) 可写为:
\[ F_4= \frac{\gamma}{\gamma-1}pu +\rho u\frac{u^2+v^2}{2} \]
类似地:
\[ G_4= \frac{\gamma}{\gamma-1}pv +\rho v\frac{u^2+v^2}{2} \]
这样处理的目的是什么?
下游推进的基本思想
假设在某一初始数据线 \(x=x_0\) 上,所有流动变量已知。
由控制方程:
\[ \frac{\partial F}{\partial x} =-\frac{\partial G}{\partial y} \]
若能计算右端的 \(y\) 方向导数,就能得到:
\[ \frac{\partial F}{\partial x} \]
于是可从 \(x_0\) 推进到:
\[ x_0+\Delta x \]
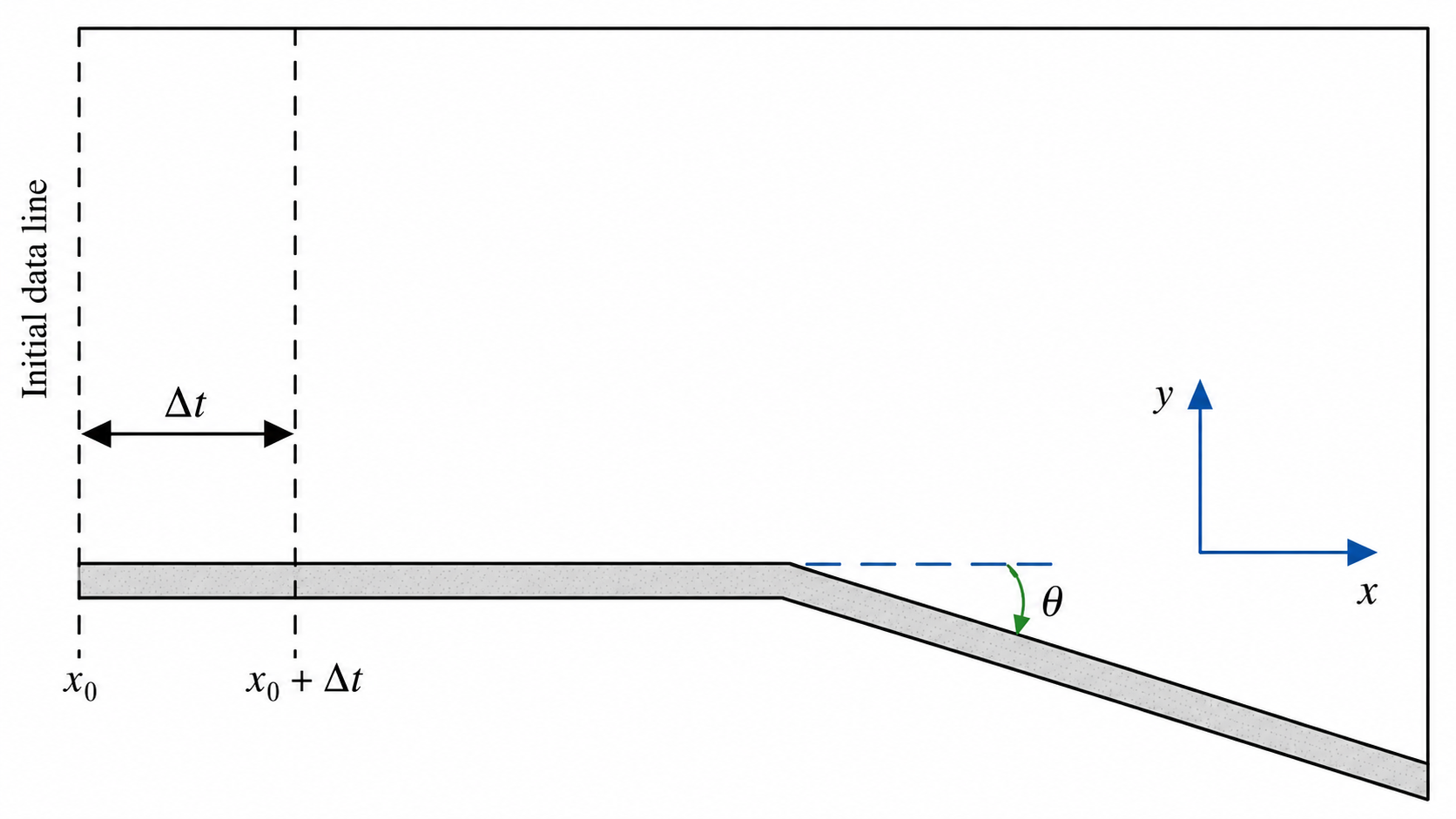
图示:从初始数据线沿 \(x\) 方向逐步推进
从通量变量反求基本变量 ❶
数值推进直接得到的是:
\[ F_1,\quad F_2,\quad F_3,\quad F_4 \]
而真正需要分析的物理变量是:
\[ \rho,\quad u,\quad v,\quad p,\quad T \]
密度由一个二次方程得到:
\[ \rho= \frac{-B+\sqrt{B^2-4AC}}{2A} \]
其中:
\[ A=\frac{F_3^2}{2F_1^2}-F_4, \qquad B=\frac{\gamma}{\gamma-1}F_1F_2, \qquad C=-\frac{\gamma+1}{2(\gamma-1)}F_1^3 \]
从通量变量反求基本变量 ❷
密度 \(\rho\) 得到后,其余变量为:
\[ u=\frac{F_1}{\rho} \]
\[ v=\frac{F_3}{F_1} \]
\[ p=F_2-F_1u \]
\[ T=\frac{p}{\rho R} \]
直接由 \(F\) 构造 \(G\) ❶
为了计算:
\[ \frac{\partial F}{\partial x} =-\frac{\partial G}{\partial y} \]
需要在每个推进位置计算 \(G\)。
一种方法是:
\[ F\rightarrow \rho,u,v,p,T\rightarrow G \]
但可以采用守恒处理方式:
直接由 \(F_1,F_2,F_3,F_4\) 构造 \(G_1,G_2,G_3,G_4\)。
直接由 \(F\) 构造 \(G\) ❷
由定义可得:
\[ G_1=\rho v =\rho\frac{F_3}{F_1} \]
又因为:
\[ G_2=\rho uv=F_3 \]
对于 \(G_3\):
\[ G_3=\rho v^2+p =\rho\left(\frac{F_3}{F_1}\right)^2+p \]
其中:
\[ p=F_2-\frac{F_1^2}{\rho}\quad \Longrightarrow \quad G_3= \rho\left(\frac{F_3}{F_1}\right)^2 +F_2-\frac{F_1^2}{\rho} \]
直接由 \(F\) 构造 \(G\) ❸
对于能量通量:
\[ G_4= \frac{\gamma}{\gamma-1}pv +\rho v\frac{u^2+v^2}{2} \]
代入:
\[ u=\frac{F_1}{\rho},\qquad v=\frac{F_3}{F_1},\qquad p=F_2-\frac{F_1^2}{\rho} \]
得到:
\[ G_4= \frac{\gamma}{\gamma-1} \left(F_2-\frac{F_1^2}{\rho}\right) \frac{F_3}{F_1} +\frac{\rho F_3}{2F_1} \left[ \left(\frac{F_1}{\rho}\right)^2 +\left(\frac{F_3}{F_1}\right)^2 \right] \]
这一组关系使得数值推进过程始终保持在守恒变量框架内。
贴体坐标变换
BOUNDARY-FITTED COORDINATES
从物理平面到计算平面
膨胀角后的壁面发生倾斜,物理区域不再是简单矩形。
为了使用规则网格,需要将物理平面变换到计算平面。
为什么需要坐标变换?
膨胀角下游,壁面向下倾斜。
因此物理平面中的计算区域不是严格矩形。
为了在规则网格上使用有限差分,
需要将物理平面 \((x,y)\) 映射到计算平面
\((\xi,\eta)\)。
要求:
- 下壁面对应 \(\eta=0\)
- 上边界对应 \(\eta=1\)
- 计算平面中网格为规则矩形
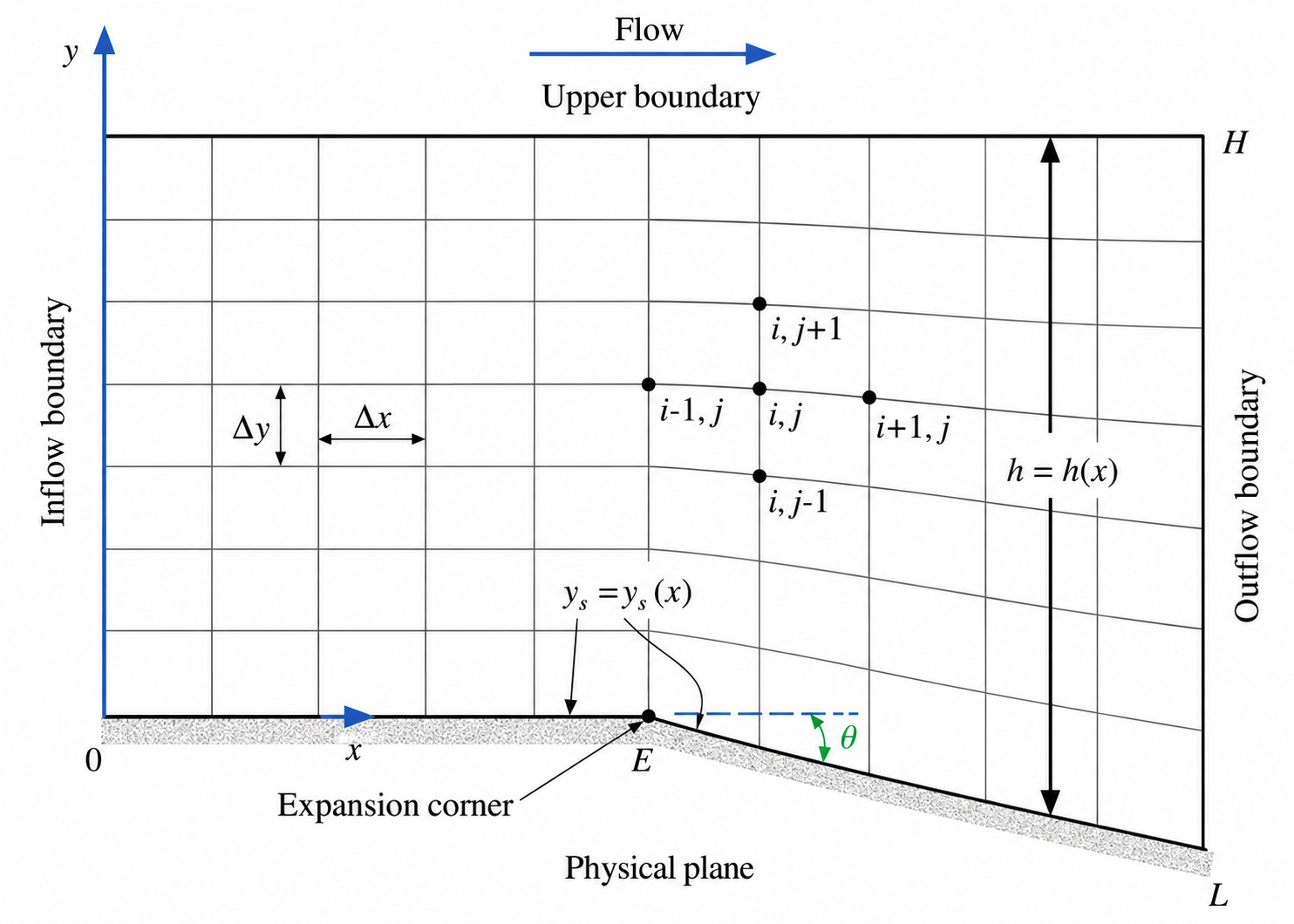
物理平面与计算平面
坐标变换定义
采用如下简单贴体变换:
\[ \xi=x \]
\[ \eta=\frac{y-y_s(x)}{h(x)} \]
其中:
- \(y_s(x)\):固壁下边界位置
- \(h(x)\):从下壁面到上边界的局部高度
该变换保证:
\[ y=y_s(x)\Rightarrow \eta=0 \]
\[ y=y_s(x)+h(x)\Rightarrow \eta=1 \]
变换导数 ❶ 基本关系
由链式法则:
\[ \frac{\partial}{\partial x}= \frac{\partial}{\partial \xi} \frac{\partial \xi}{\partial x}+ \frac{\partial}{\partial \eta} \frac{\partial \eta}{\partial x} \]
\[ \frac{\partial}{\partial y}= \frac{\partial}{\partial \xi} \frac{\partial \xi}{\partial y}+ \frac{\partial}{\partial \eta} \frac{\partial \eta}{\partial y} \]
由 \(\xi=x\) 可得:
\[ \frac{\partial \xi}{\partial x}=1,\qquad \frac{\partial \xi}{\partial y}=0 \]
由 \(\eta=(y-y_s)/h\) 可得:
\[ \frac{\partial \eta}{\partial y}=\frac{1}{h} \]
变换导数 ❷ \(\partial\eta/\partial x\)
由:
\[ \eta=\frac{y-y_s(x)}{h(x)} \]
在固定 \(y\) 下对 \(x\) 求导:
\[ \frac{\partial\eta}{\partial x}= -\frac{1}{h}\frac{dy_s}{dx} -\frac{\eta}{h}\frac{dh}{dx} \]
膨胀角位置记为 \(x=E\)。
对 \(x\le E\):
\[ y_s=0,\qquad h=\text{constant}\qquad \Longrightarrow \qquad \frac{\partial\eta}{\partial x}=0 \]
变换导数 ❸ 膨胀角下游
对 \(x\ge E\):
\[ y_s=-(x-E)\tan\theta \]
\[ h=H+(x-E)\tan\theta \]
因此:
\[ \frac{dy_s}{dx}=-\tan\theta,\qquad \frac{dh}{dx}=\tan\theta \qquad \Longrightarrow \qquad \frac{\partial\eta}{\partial x}= \frac{(1-\eta)\tan\theta}{h} \]
所以:
\[ \frac{\partial\eta}{\partial x}= \begin{cases} 0,&x\le E\\[4pt] \dfrac{(1-\eta)\tan\theta}{h},&x\ge E \end{cases} \]
变换后的导数算子
最终得到:
\[ \colorbox{yellow}{$\displaystyle \color{black}{ \frac{\partial}{\partial x}= \frac{\partial}{\partial \xi}+ \frac{\partial\eta}{\partial x} \frac{\partial}{\partial\eta} } $} \]
以及:
\[ \colorbox{yellow}{$\displaystyle \color{black}{ \frac{\partial}{\partial y}= \frac{1}{h} \frac{\partial}{\partial\eta} } $} \]
这一步的意义是:
把物理平面中的偏导数,转化为计算平面规则网格上的偏导数。
控制方程的坐标变换
原方程为:
\[ \frac{\partial F}{\partial x} =-\frac{\partial G}{\partial y} \]
代入导数变换:
\[ \frac{\partial F}{\partial \xi}+ \left(\frac{\partial\eta}{\partial x}\right) \frac{\partial F}{\partial\eta}= -\frac{1}{h} \frac{\partial G}{\partial\eta} \]
整理得到:
\[ \colorbox{yellow}{$\displaystyle \color{black}{ \frac{\partial F}{\partial \xi}= -\left[ \left(\frac{\partial\eta}{\partial x}\right) \frac{\partial F}{\partial\eta}+ \frac{1}{h} \frac{\partial G}{\partial\eta} \right] } $} \]
这就是下游推进所用的计算平面控制方程。
变换后的四个方程
写成分量形式:
\[ \frac{\partial F_1}{\partial \xi}= -\left[ \left(\frac{\partial\eta}{\partial x}\right) \frac{\partial F_1}{\partial\eta} + \frac{1}{h}\frac{\partial G_1}{\partial\eta} \right] \]
\[ \frac{\partial F_2}{\partial \xi}= -\left[ \left(\frac{\partial\eta}{\partial x}\right) \frac{\partial F_2}{\partial\eta} + \frac{1}{h}\frac{\partial G_2}{\partial\eta} \right] \]
\[ \frac{\partial F_3}{\partial \xi}= -\left[ \left(\frac{\partial\eta}{\partial x}\right) \frac{\partial F_3}{\partial\eta} + \frac{1}{h}\frac{\partial G_3}{\partial\eta} \right] \]
\[ \frac{\partial F_4}{\partial \xi}= -\left[ \left(\frac{\partial\eta}{\partial x}\right) \frac{\partial F_4}{\partial\eta} + \frac{1}{h}\frac{\partial G_4}{\partial\eta} \right] \]
关于量纲变量
我们在本算例中直接使用有量纲变量。
使用有量纲变量并不会影响 CFD 求解的正确性。
关键是所有物理量必须采用一致单位。
本章采用 SI 单位制:
- 长度:m
- 密度:kg/m\(^3\)
- 压强:N/m\(^2\)
- 温度:K
- 速度:m/s
这样可以直接获得具有工程量级感的计算结果。
算例设置
PROBLEM SETUP
膨胀角流动计算区域
来流为 \(M_1=2\) 的均匀超声流,
在 \(x=10\,\mathrm{m}\)
处绕过一个小膨胀角。
物理计算区域
计算区域:
\[ 0\le x\le 65\,\mathrm{m} \]
\[ 0\le y\le 40\,\mathrm{m} \quad \text{上游区域} \]
膨胀角位置:
\[ E=10\,\mathrm{m} \]
壁面转角:
\[ \theta=5.352^\circ \]
来流条件:
\[ M_1=2, \qquad p_1=1.01\times10^5\,\mathrm{N/m^2} \]
\[ \rho_1=1.23\,\mathrm{kg/m^3}, \qquad T_1=286.1\,\mathrm{K} \]
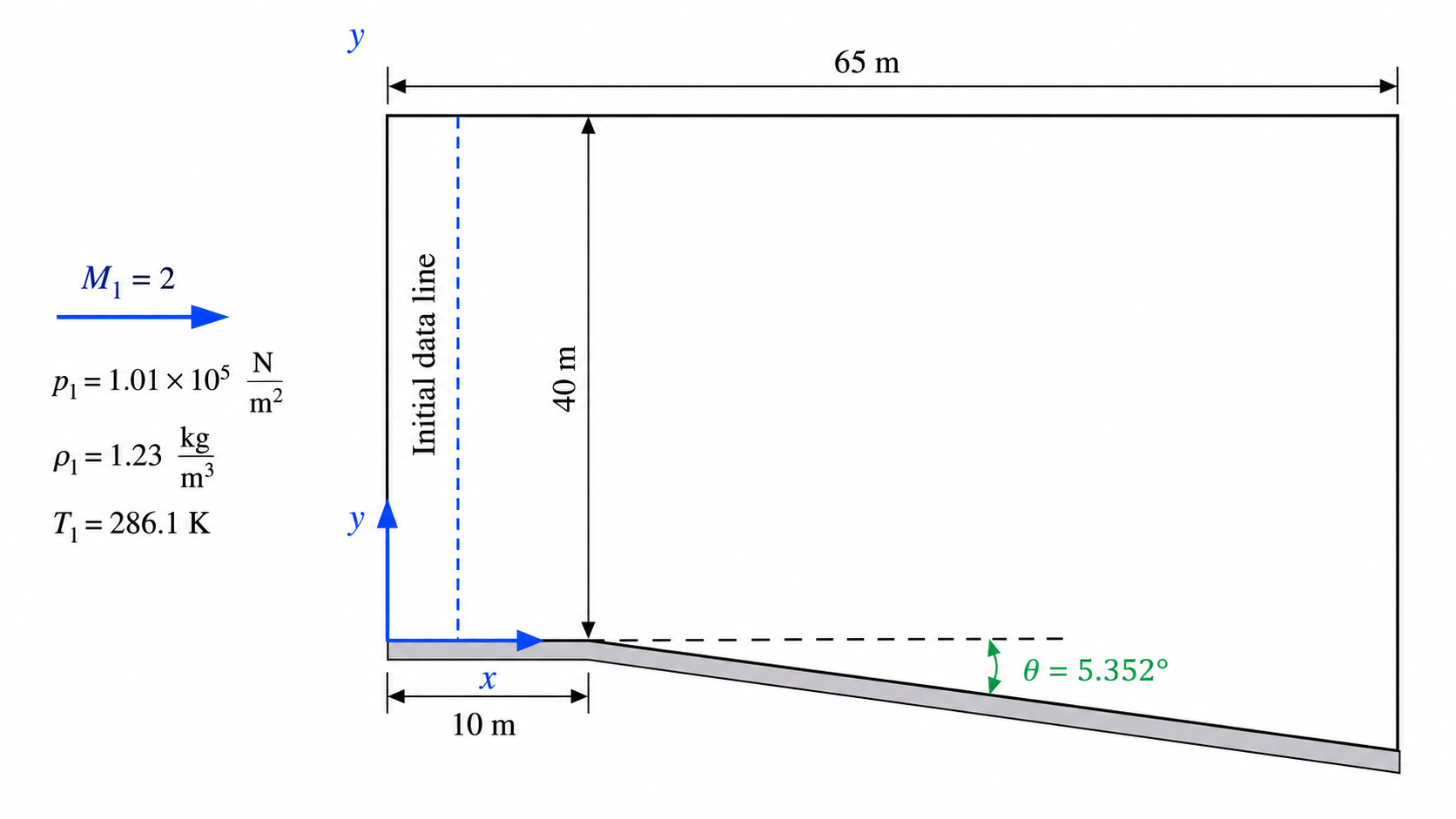
物理平面计算区域
局部高度函数 \(h(x)\)
对该几何,局部高度 \(h=h(x)\) 为:
\[ h= \begin{cases} 40\,\mathrm{m},&0\le x\le 10\,\mathrm{m}\\[4pt] 40+(x-10)\tan\theta,&10\le x\le 65\,\mathrm{m} \end{cases} \]
该函数用于计算:
\[ \frac{\partial\eta}{\partial x}= \begin{cases} 0,&x\le E\\[4pt] \dfrac{(1-\eta)\tan\theta}{h},&x\ge E \end{cases} \]
几何变化通过 \(h(x)\) 和 \(\partial\eta/\partial x\) 进入控制方程。
初始条件
初始数据线取在:
\[ x=0 \]
在这条竖直线上,每个网格点都给定相同的均匀来流条件。
我们将 \(x=0\) 的初始数据线划分为:
\[ 41 \]
个网格点,即:
\[ j=1,2,\dots,41 \]
这意味着数值计算从一条已知的竖直初始线出发,
沿 \(x\) 方向一步一步向下游推进。
初始条件
在 \(x=0\) 的所有 \(j\) 点上:
\[ u=0.678\times10^3\,\mathrm{m/s} \]
\[ v=0 \]
\[ \rho=0.123\times10^1\,\mathrm{kg/m^3} \]
\[ p=0.101\times10^6\,\mathrm{N/m^2} \]
\[ T=0.286\times10^3\,\mathrm{K} \]
\[ M=0.200\times10^1 \]
也即:
\[ u\approx678\,\mathrm{m/s},\quad \rho\approx1.23\,\mathrm{kg/m^3},\quad p\approx1.01\times10^5\,\mathrm{N/m^2},\quad T\approx286\,\mathrm{K},\quad M=2 \]
差分格式:MacCormack 空间推进
这里的推进变量不是时间,而是:
\[ \xi \]
因此,MacCormack 方法用于空间推进:
\[ \xi_i\rightarrow \xi_{i+1} \]
类比前面时间推进中的预测—校正格式:
预测步:沿 \(\eta\)
方向采用前向差分
校正步:沿 \(\eta\)
方向采用后向差分
当前先给出预测步。
预测步 ❶ 连续方程
由:
\[ \frac{\partial F_1}{\partial \xi}= -\left[ \left(\frac{\partial\eta}{\partial x}\right) \frac{\partial F_1}{\partial\eta} + \frac{1}{h}\frac{\partial G_1}{\partial\eta} \right] \]
预测步采用前向差分:
\[ \left( \frac{\partial F_1}{\partial \xi} \right)_{i,j}= \left(\frac{\partial\eta}{\partial x}\right)_{i,j} \frac{(F_1)_{i,j}-(F_1)_{i,j+1}}{\Delta\eta} + \frac{1}{h} \frac{(G_1)_{i,j}-(G_1)_{i,j+1}}{\Delta\eta} \]
预测步 ❷ \(x\) 动量方程
由:
\[ \frac{\partial F_2}{\partial \xi}= -\left[ \left(\frac{\partial\eta}{\partial x}\right) \frac{\partial F_2}{\partial\eta} + \frac{1}{h}\frac{\partial G_2}{\partial\eta} \right] \]
预测步为:
\[ \left( \frac{\partial F_2}{\partial \xi} \right)_{i,j}= \left(\frac{\partial\eta}{\partial x}\right)_{i,j} \frac{(F_2)_{i,j}-(F_2)_{i,j+1}}{\Delta\eta} + \frac{1}{h} \frac{(G_2)_{i,j}-(G_2)_{i,j+1}}{\Delta\eta} \]
预测步 ❸ \(y\) 动量方程
由:
\[ \frac{\partial F_3}{\partial \xi}= -\left[ \left(\frac{\partial\eta}{\partial x}\right) \frac{\partial F_3}{\partial\eta} + \frac{1}{h}\frac{\partial G_3}{\partial\eta} \right] \]
预测步为:
\[ \left( \frac{\partial F_3}{\partial \xi} \right)_{i,j}= \left(\frac{\partial\eta}{\partial x}\right)_{i,j} \frac{(F_3)_{i,j}-(F_3)_{i,j+1}}{\Delta\eta} + \frac{1}{h} \frac{(G_3)_{i,j}-(G_3)_{i,j+1}}{\Delta\eta} \]
预测步 ❹ 能量方程
由:
\[ \frac{\partial F_4}{\partial \xi}= -\left[ \left(\frac{\partial\eta}{\partial x}\right) \frac{\partial F_4}{\partial\eta} + \frac{1}{h}\frac{\partial G_4}{\partial\eta} \right] \]
预测步为:
\[ \left( \frac{\partial F_4}{\partial \xi} \right)_{i,j}= \left(\frac{\partial\eta}{\partial x}\right)_{i,j} \frac{(F_4)_{i,j}-(F_4)_{i,j+1}}{\Delta\eta} + \frac{1}{h} \frac{(G_4)_{i,j}-(G_4)_{i,j+1}}{\Delta\eta} \]
到目前为止
目前已经完成:
❶ 物理问题:Prandtl–Meyer 膨胀波
❷ 解析解:\(f_2=f_1+\theta\)
❸ 控制方程:二维定常 Euler 强守恒形式
❹ 推进变量:\(F_1,F_2,F_3,F_4\)
❺ 坐标变换:\((x,y)\rightarrow(\xi,\eta)\)
❻ 数值方法:MacCormack 空间推进预测步
后续需要继续处理:
- 校正步
- 边界条件
- 由 \(F\) 恢复物理变量
- 数值结果与解析解对比
预测步 ❺ 更新预测值
由预测步得到的 \(\partial F_k/\partial \xi\),可将通量变量从站位 \(i\) 推进到预测站位 \(i+1\):
\[ (\overline{F}_1)_{i+1,j} =(F_1)_{i,j} +\left( \frac{\partial F_1}{\partial \xi} \right)_{i,j}\Delta\xi \]
\[ (\overline{F}_2)_{i+1,j} =(F_2)_{i,j} +\left( \frac{\partial F_2}{\partial \xi} \right)_{i,j}\Delta\xi \]
\[ (\overline{F}_3)_{i+1,j} =(F_3)_{i,j} +\left( \frac{\partial F_3}{\partial \xi} \right)_{i,j}\Delta\xi \]
\[ (\overline{F}_4)_{i+1,j} =(F_4)_{i,j} +\left( \frac{\partial F_4}{\partial \xi} \right)_{i,j}\Delta\xi \]
这里的上划线表示预测值。
它们还不是最终的 \(i+1\)
站位结果,需要经过校正步修正。
预测值的解码
进入校正步之前,需要先由预测通量变量恢复预测状态量。
预测密度由二次关系得到:
\[ (\overline{\rho})_{i+1,j}= \frac{-B+\sqrt{B^2-4AC}}{2A} \]
其中:
\[ A=\frac{ (\overline{F}_3)^2_{i+1,j} }{ 2(\overline{F}_1)^2_{i+1,j} } -(\overline{F}_4)_{i+1,j} \]
\[ B=\frac{\gamma}{\gamma-1} (\overline{F}_1)_{i+1,j} (\overline{F}_2)_{i+1,j} \]
\[ C= -\frac{\gamma+1}{2(\gamma-1)} (\overline{F}_1)^3_{i+1,j} \]
预测步中 \(G\) 的构造
得到 \((\overline{\rho})_{i+1,j}\) 后,可构造预测的 \(G\) 通量。
\[ (\overline{G}_1)_{i+1,j}= (\overline{\rho})_{i+1,j} \left( \frac{\overline{F}_3}{\overline{F}_1} \right)_{i+1,j} \]
\[ (\overline{G}_2)_{i+1,j}= (\overline{F}_3)_{i+1,j} \]
\[ (\overline{G}_3)_{i+1,j}= (\overline{\rho})_{i+1,j} \left( \frac{\overline{F}_3}{\overline{F}_1} \right)^2_{i+1,j}+ (\overline{F}_2)_{i+1,j}- \frac{ (\overline{F}_1)^2_{i+1,j} }{ (\overline{\rho})_{i+1,j} } \]
\[ (\overline{G}_4)_{i+1,j}= \frac{\gamma}{\gamma-1} \left[ (\overline{F}_2)_{i+1,j}- \frac{ (\overline{F}_1)^2_{i+1,j} }{ (\overline{\rho})_{i+1,j} } \right] \left( \frac{\overline{F}_3}{\overline{F}_1} \right)_{i+1,j}+ \frac{(\overline{\rho})_{i+1,j}}{2} \left( \frac{\overline{F}_3}{\overline{F}_1} \right)_{i+1,j} \left[ \left( \frac{\overline{F}_1}{\overline{\rho}} \right)^2_{i+1,j}+ \left( \frac{\overline{F}_3}{\overline{F}_1} \right)^2_{i+1,j} \right] \]
到此为止,校正步所需的预测通量 \(\overline{F}\) 和 \(\overline{G}\) 已经准备好。
校正步
CORRECTOR STEP
用预测值重新计算空间导数
预测步使用前向差分,校正步改用后向差分。
两者平均后,得到二阶精度的空间推进格式。
校正步 ❶ 连续方程
校正步仍从变换后的控制方程出发:
\[ \frac{\partial F_1}{\partial \xi}= -\left[ \left(\frac{\partial\eta}{\partial x}\right) \frac{\partial F_1}{\partial\eta}+ \frac{1}{h} \frac{\partial G_1}{\partial\eta} \right] \]
此时采用预测值,并在 \(\eta\) 方向使用后向差分:
\[ \left( \frac{\overline{\partial F_1}}{\partial \xi} \right)_{i+1,j}= \left(\frac{\partial\eta}{\partial x}\right) \frac{ (\overline{F}_1)_{i+1,j-1}- (\overline{F}_1)_{i+1,j} }{\Delta\eta}+ \frac{1}{h} \frac{ (\overline{G}_1)_{i+1,j-1}- (\overline{G}_1)_{i+1,j} }{\Delta\eta} \]
校正步 ❷ 其余三个方程
类似地,有:
\[ \left( \frac{\overline{\partial F_2}}{\partial \xi} \right)_{i+1,j}= \left(\frac{\partial\eta}{\partial x}\right) \frac{ (\overline{F}_2)_{i+1,j-1}- (\overline{F}_2)_{i+1,j} }{\Delta\eta}+ \frac{1}{h} \frac{ (\overline{G}_2)_{i+1,j-1}- (\overline{G}_2)_{i+1,j} }{\Delta\eta} \]
\[ \left( \frac{\overline{\partial F_3}}{\partial \xi} \right)_{i+1,j}= \left(\frac{\partial\eta}{\partial x}\right) \frac{ (\overline{F}_3)_{i+1,j-1}- (\overline{F}_3)_{i+1,j} }{\Delta\eta}+ \frac{1}{h} \frac{ (\overline{G}_3)_{i+1,j-1}- (\overline{G}_3)_{i+1,j} }{\Delta\eta} \]
\[ \left( \frac{\overline{\partial F_4}}{\partial \xi} \right)_{i+1,j}= \left(\frac{\partial\eta}{\partial x}\right) \frac{ (\overline{F}_4)_{i+1,j-1}- (\overline{F}_4)_{i+1,j} }{\Delta\eta}+ \frac{1}{h} \frac{ (\overline{G}_4)_{i+1,j-1}- (\overline{G}_4)_{i+1,j} }{\Delta\eta} \]
平均空间导数
预测步和校正步得到两个空间导数。
对它们取平均:
\[ \left( \frac{\partial F_1}{\partial \xi} \right)_{\mathrm{av}}= \frac{1}{2} \left[ \left( \frac{\partial F_1}{\partial \xi} \right)_{i,j}+ \left( \frac{\overline{\partial F_1}}{\partial \xi} \right)_{i+1,j} \right] \]
\[ \left( \frac{\partial F_2}{\partial \xi} \right)_{\mathrm{av}}= \frac{1}{2} \left[ \left( \frac{\partial F_2}{\partial \xi} \right)_{i,j}+ \left( \frac{\overline{\partial F_2}}{\partial \xi} \right)_{i+1,j} \right] \]
\[ \left( \frac{\partial F_3}{\partial \xi} \right)_{\mathrm{av}}= \frac{1}{2} \left[ \left( \frac{\partial F_3}{\partial \xi} \right)_{i,j}+ \left( \frac{\overline{\partial F_3}}{\partial \xi} \right)_{i+1,j} \right] \]
\[ \left( \frac{\partial F_4}{\partial \xi} \right)_{\mathrm{av}}= \frac{1}{2} \left[ \left( \frac{\partial F_4}{\partial \xi} \right)_{i,j}+ \left( \frac{\overline{\partial F_4}}{\partial \xi} \right)_{i+1,j} \right] \]
最终更新
得到平均空间导数后,更新到下一个站位:
\[ (F_1)_{i+1,j}= (F_1)_{i,j}+ \left( \frac{\partial F_1}{\partial \xi} \right)_{\mathrm{av}} \Delta\xi \]
\[ (F_2)_{i+1,j}= (F_2)_{i,j}+ \left( \frac{\partial F_2}{\partial \xi} \right)_{\mathrm{av}} \Delta\xi \]
\[ (F_3)_{i+1,j}= (F_3)_{i,j}+ \left( \frac{\partial F_3}{\partial \xi} \right)_{\mathrm{av}} \Delta\xi \]
\[ (F_4)_{i+1,j}= (F_4)_{i,j}+ \left( \frac{\partial F_4}{\partial \xi} \right)_{\mathrm{av}} \Delta\xi \]
人工粘性
ARTIFICIAL VISCOSITY
抑制膨胀角附近的数值振荡
膨胀角处存在几何奇异性,度量项发生突变。
人工粘性用于抑制由这种突变诱发的非物理振荡。
为什么需要人工粘性?
本问题中,膨胀角位于:
\[ x=10\,\mathrm{m} \]
该点是一个几何奇异点,壁面方向突然改变。
在控制方程中,这种突变体现为度量项:
\[ \frac{\partial\eta}{\partial x} \]
在膨胀角前后不连续。
这种不连续会在数值解中诱发振荡。
因此需要加入人工粘性来平滑高频误差。
预测步人工粘性
预测步中,对 \(F_1\) 和 \(F_2\) 的人工粘性项可写为:
\[ (SF_1)_{i,j}= \frac{ C_y|p_{i,j+1}-2p_{i,j}+p_{i,j-1}| }{ p_{i,j+1}+2p_{i,j}+p_{i,j-1} } \left[ (F_1)_{i,j+1} -2(F_1)_{i,j} +(F_1)_{i,j-1} \right] \]
\[ (SF_2)_{i,j}= \frac{ C_y|p_{i,j+1}-2p_{i,j}+p_{i,j-1}| }{ p_{i,j+1}+2p_{i,j}+p_{i,j-1} } \left[ (F_2)_{i,j+1} -2(F_2)_{i,j} +(F_2)_{i,j-1} \right] \]
\(SF_3\) 和 \(SF_4\) 具有相同形式。
预测步加入人工粘性
加入人工粘性后,预测更新变为:
\[ (\overline{F}_1)_{i+1,j}= (F_1)_{i,j}+ \left( \frac{\partial F_1}{\partial \xi} \right)_{i,j} \Delta\xi+ (SF_1)_{i,j} \]
\[ (\overline{F}_2)_{i+1,j}= (F_2)_{i,j}+ \left( \frac{\partial F_2}{\partial \xi} \right)_{i,j} \Delta\xi+ (SF_2)_{i,j} \]
类似地:
\[ (\overline{F}_3)_{i+1,j}= (F_3)_{i,j}+ \left( \frac{\partial F_3}{\partial \xi} \right)_{i,j} \Delta\xi+ (SF_3)_{i,j} \]
\[ (\overline{F}_4)_{i+1,j}= (F_4)_{i,j}+ \left( \frac{\partial F_4}{\partial \xi} \right)_{i,j} \Delta\xi+ (SF_4)_{i,j} \]
校正步人工粘性
校正步也要加入人工粘性。此时使用预测变量:
\[ (\overline{SF}_1)_{i+1,j}= \frac{ C_y|\overline{p}_{i+1,j+1}-2\overline{p}_{i+1,j}+\overline{p}_{i+1,j-1}| }{ \overline{p}_{i+1,j+1}+2\overline{p}_{i+1,j}+\overline{p}_{i+1,j-1} } \left[ (\overline{F}_1)_{i+1,j+1} -2(\overline{F}_1)_{i+1,j} +(\overline{F}_1)_{i+1,j-1} \right] \]
\[ (\overline{SF}_2)_{i+1,j}= \frac{ C_y|\overline{p}_{i+1,j+1}-2\overline{p}_{i+1,j}+\overline{p}_{i+1,j-1}| }{ \overline{p}_{i+1,j+1}+2\overline{p}_{i+1,j}+\overline{p}_{i+1,j-1} } \left[ (\overline{F}_2)_{i+1,j+1} -2(\overline{F}_2)_{i+1,j} +(\overline{F}_2)_{i+1,j-1} \right] \]
\(\overline{SF}_3\) 和 \(\overline{SF}_4\) 类似。
校正后最终更新
最终更新时加入校正步人工粘性:
\[ (F_1)_{i+1,j}= (F_1)_{i,j}+ \left( \frac{\partial F_1}{\partial \xi} \right)_{\mathrm{av}} \Delta\xi+ (\overline{SF}_1)_{i+1,j} \]
\[ (F_2)_{i+1,j}= (F_2)_{i,j}+ \left( \frac{\partial F_2}{\partial \xi} \right)_{\mathrm{av}} \Delta\xi + (\overline{SF}_2)_{i+1,j} \]
类似地可得到 \((F_3)_{i+1,j}\) 和 \((F_4)_{i+1,j}\)。
完成这一步后,内部网格点 \(j=2\) 到 \(j=40\) 的流场变量已经可由 \(F_1\) 到 \(F_4\) 解码得到。
壁面边界条件
WALL BOUNDARY CONDITION
无粘壁面:速度必须与壁面相切
无粘流在固壁上的物理边界条件不是无滑移,
而是法向速度为零,即流动沿壁面切向运动。
壁面条件的物理要求
对无粘流,壁面处正确的物理条件是:
\[ \mathbf{V}\cdot\mathbf{n}=0 \]
也即速度必须与壁面相切。
这是壁面处唯一必须施加的物理边界条件。
其他变量应由内部流场和相容关系决定。
但在数值计算中,壁面位于边界点,缺少壁面外侧网格点。
因此需要特殊处理。
Abbett 壁面边界处理 ❶
采用 Abbett 提出的处理方式。
第一步:用单边差分,先计算壁面点的试算值:
\[ u_{\mathrm{cal}},\quad v_{\mathrm{cal}},\quad p_{\mathrm{cal}},\quad T_{\mathrm{cal}},\quad \rho_{\mathrm{cal}} \]
得到的速度一般不严格与壁面相切。
令该速度方向与水平线夹角为:
\[ \phi_1=\tan^{-1}\frac{v_1}{u_1} \]
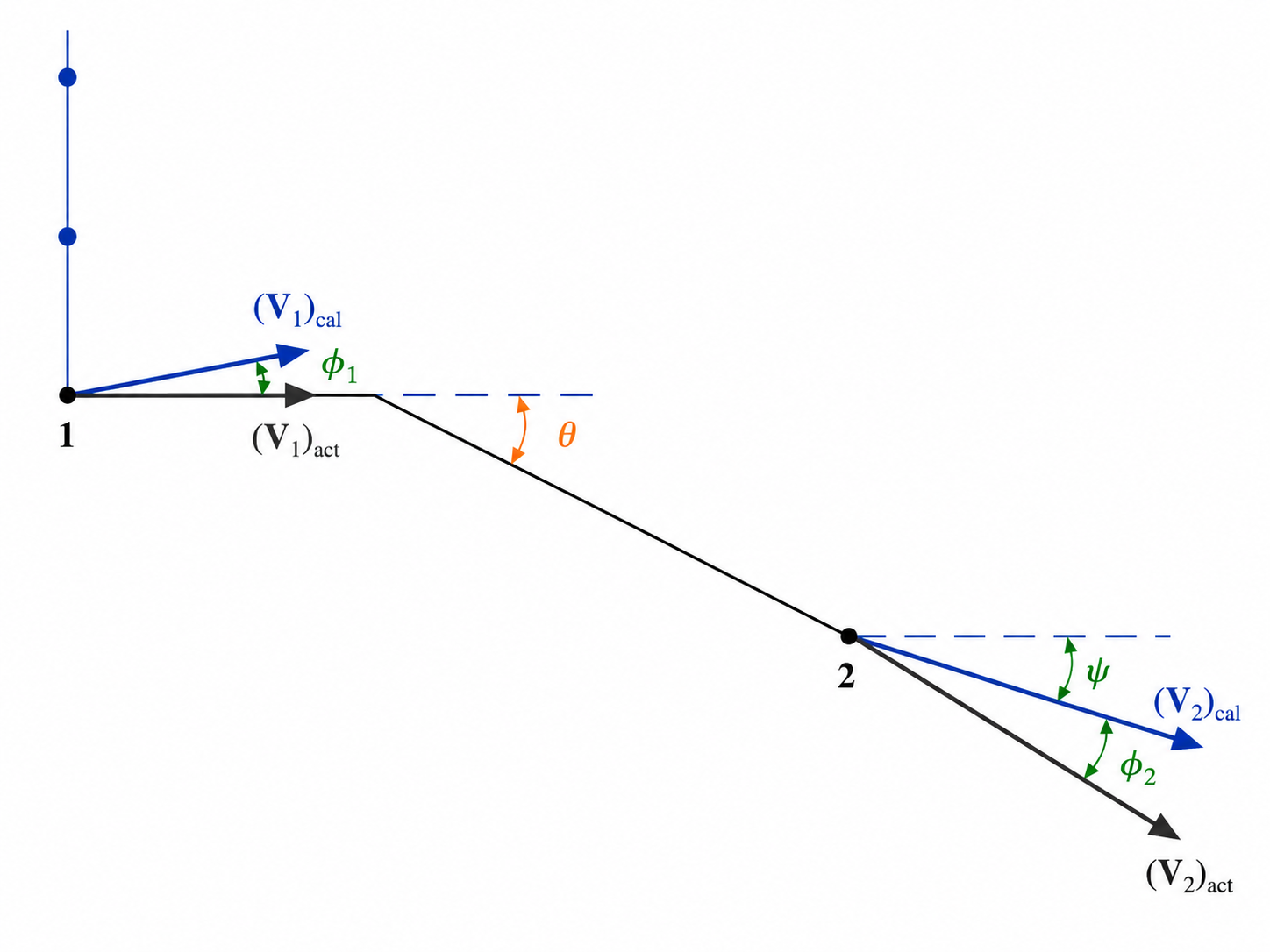
Abbott 壁面边界条件示意
Abbett 壁面边界处理 ❷
壁面试算 Mach 数为:
\[ (M_1)_{\mathrm{cal}}= \frac{ \sqrt{(u_1)^2_{\mathrm{cal}}+(v_1)^2_{\mathrm{cal}}} }{ (a_1)_{\mathrm{cal}} } \]
由此可计算对应的 Prandtl–Meyer 函数:
\[ f_{\mathrm{cal}}=f\left((M_1)_{\mathrm{cal}}\right) \]
接着设想通过一个局部 Prandtl–Meyer 波,把试算速度旋转到壁面切向。
这一步不是说壁面真实存在一个膨胀波,
而是用一个局部等熵修正来消除数值计算产生的法向速度。
Abbett 壁面边界处理 ❸
对于膨胀角上游壁面,修正后的 Prandtl–Meyer 函数为:
\[ f_{\mathrm{act}}=f_{\mathrm{cal}}+\phi_1 \]
由 \(f_{\mathrm{act}}\) 反求:
\[ (M_1)_{\mathrm{act}} \]
然后利用等熵关系修正壁面热力学量:
\[ p_{\mathrm{act}}=p_{\mathrm{cal}} \left[ \frac{ 1+\frac{\gamma-1}{2}M^2_{\mathrm{cal}} }{ 1+\frac{\gamma-1}{2}M^2_{\mathrm{act}} } \right]^{\gamma/(\gamma-1)} \]
\[ T_{\mathrm{act}}= T_{\mathrm{cal}} \frac{ 1+\frac{\gamma-1}{2}M^2_{\mathrm{cal}} }{ 1+\frac{\gamma-1}{2}M^2_{\mathrm{act}} } \]
\[ \rho_{\mathrm{act}}= \frac{p_{\mathrm{act}}}{RT_{\mathrm{act}}} \]
膨胀角下游壁面
膨胀角下游,壁面本身有倾角 \(\theta\)。
设试算速度方向与水平线夹角为:
\[ \psi=\tan^{-1}\frac{|v_2|}{u_2} \]
为了使速度最终与壁面相切,需要旋转的角度为:
\[ \phi_2=\theta-\psi \]
相应地:
\[ f_{\mathrm{act}}=f_{\mathrm{cal}}+\phi_2 \]
若试算速度指向壁内,则 \(\phi_2\)
可能为负。
这相当于通过一个局部等熵压缩修正,使速度重新与壁面相切。
下游推进步长
MARCHING STEP SIZE
空间推进中的 CFL 条件
定常超声流的下游推进也存在稳定性限制。
推进步长不能大到跨过 Mach
信息传播所允许的范围。
为什么空间推进也有 CFL 限制?
在时间推进中,CFL 条件限制的是:
\[ \Delta t \]
在下游推进中,限制的是:
\[ \Delta x \quad\text{或}\quad \Delta \xi \]
原因相同:数值推进不能越过物理信息传播的影响范围。
对超声定常流,信息沿 Mach 线传播。
因此下游推进步长必须与 Mach 线斜率相容。
Mach 线与推进步长 ❶
设局部流线相对 \(x\) 轴夹角为:
\[ \theta \]
局部 Mach 角为:
\[ \mu \]
两族 Mach 线相对 \(x\) 轴的夹角为:
\[ \theta+\mu,\qquad \theta-\mu \]
对左行/右行 Mach 线,分别有:
\[ (\Delta x)_1= \frac{\Delta y}{\tan(\theta+\mu)_1}, \qquad (\Delta x)_3= \frac{\Delta y}{\tan(\theta-\mu)_3} \]
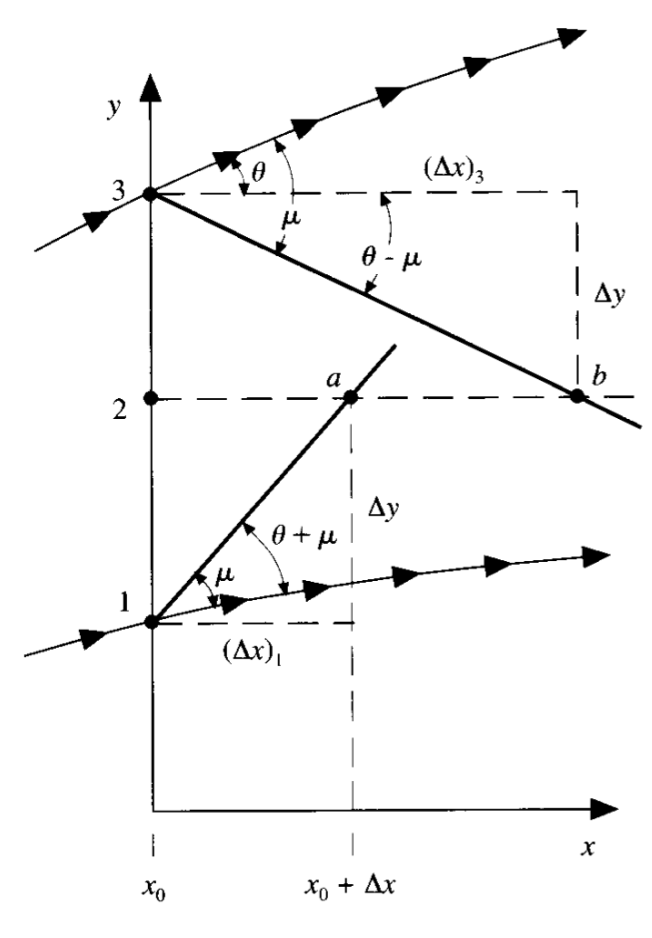
Mach 线约束下游推进步长
Mach 线与推进步长 ❷
为了保证所有网格点都满足稳定性要求,应取最严格的限制。
因此:
\[ \Delta x= \frac{\Delta y}{ |\tan(\theta\pm\mu)|_{\max} } \]
在计算平面中,由于:
\[ \xi=x \]
推进步长应满足:
\[ \Delta\xi\leq\Delta x \]
引入 Courant 数 \(C\),得到:
\[ \colorbox{yellow}{$\displaystyle \color{black}{ \Delta\xi=C \frac{\Delta y}{ |\tan(\theta\pm\mu)|_{\max} } } $} \]
其中:
\[ C\leq1 \]
下游推进步长的物理意义
公式:
\[ \Delta\xi=C \frac{\Delta y}{ |\tan(\theta\pm\mu)|_{\max} } \]
说明:
- \(\Delta y\) 越小,允许的推进步长越小
- Mach 线越陡,允许的推进步长越小
- 局部流动转角和 Mach 角共同决定稳定性限制
- \(C\) 起到安全系数作用
它是时间推进 CFL 条件在定常超声空间推进中的对应形式。
小结:本节完成的数值流程
到此,二维 Prandtl–Meyer 膨胀波的空间推进算法已经基本完整。
算法流程:
❶ 已知站位 \(i\) 的 \(F\)
❷ 构造 \(G\)
❸ 预测步得到 \(\overline{F}\)
❹ 解码 \(\overline{\rho}\) 并构造 \(\overline{G}\)
❺ 校正步得到平均导数
❻ 加入人工粘性
❼ 更新 \(F\) 到站位 \(i+1\)
❽ 解码得到 \(\rho,u,v,p,T\)
❾ 对壁面点施加无穿透边界条件
❿ 根据 CFL 条件确定下一步 \(\Delta\xi\)
课堂互动:算法与物理的对应
请思考:
- 为什么该问题可以沿 \(x\)
方向推进,而不是必须全场联立求解?
- 为什么要用强守恒形式中的 \(F_1,F_2,F_3,F_4\) 作为推进变量?
- 膨胀角处为什么容易产生数值振荡?
- 壁面处为什么不是指定 \(u\) 和 \(v\),而是只要求速度与壁面相切?
- 空间推进中的 CFL 条件和时间推进中的 CFL 条件有什么共同点?
核心理解:
超声流的信息向下游传播,因此可以空间推进;但推进步长必须尊重
Mach 线给出的信息传播范围。
最终计算结果
FINAL RESULTS
数值解与解析解的对比
最终结果通过多个流向站位上的速度剖面来展示。
重点关注膨胀波如何从壁面发出,并向上游计算区域内部展开。
最终结果的展示方式
教材将 \(x\) 方向速度分量 \(u\) 画成不同流向站位上的竖向剖面。
典型站位包括:
\[ x=0,\quad 16.17,\quad 32.31,\quad 48.99,\quad 66.23\,\mathrm{m} \]
图中同时给出:
- 黑点:Prandtl–Meyer 解析解
- 实线:下游推进数值解
- 斜线区域:膨胀波前缘与后缘
- 下边界:膨胀角后的壁面形状
该图的目的,是直接比较数值方法能否正确捕捉膨胀波内部和波后的速度分布。
为什么膨胀角附近误差较大?
膨胀角附近存在两个困难:
❶ 几何奇异性
\[ \frac{\partial\eta}{\partial x} \]
在膨胀角前后不连续。
❷ 网格分辨率不足
刚过膨胀角时,膨胀波很窄,壁面与膨胀波后缘之间只有少数几个网格点。
结果是:数值格式在最困难的位置“正面撞上”奇异点,
而且可用于吸收误差的网格点又很少。
网格独立性与单位尺度
GRID AND UNITS
数值结果是否依赖网格和几何尺度?
教材最后讨论两个常见问题:
网格加密是否改变结果?几何尺寸的单位选择是否影响解?
网格无关性
将 \(y\) 方向网格点数加倍:
\[ \Delta y\ \text{减半} \]
由于推进步长 \(\Delta \xi\) 与 \(\Delta y\) 相关:
\[ \Delta\xi= C\frac{\Delta y}{|\tan(\theta\pm\mu)|_{\max}} \]
所以 \(\Delta y\) 减半也会使 \(\Delta\xi\) 减小,\(x\) 方向推进步数随之增加。
整体网格点数大约增加为原来的 4 倍。
如果加密后的结果与原计算没有显著差别,说明前面的结果基本达到了网格无关性。
几何尺度与单位选择
本算例中,计算区域尺寸约为:
\[ 65\,\mathrm{m}\times40\,\mathrm{m} \]
这个长度尺度本身并不是问题的核心。
如果采用毫米作为单位,也可以把计算区域写成:
\[ 65\,\mathrm{mm}\times40\,\mathrm{mm} \]
只要所有量使用一致单位,
数值方法本身并不依赖某一个特定长度尺度。
本章总结
SUMMARY
二维超声 Prandtl–Meyer 膨胀波
本章通过一个有解析解的二维超声流问题,
展示了空间推进、贴体坐标、守恒形式、人工粘性和壁面边界条件的组合使用。
本章主线 ❶ 空间推进思想
本章的核心是:
\[ \colorbox{yellow}{$\displaystyle \color{black}{ \text{steady supersonic flow} \Rightarrow \text{space marching} } $} \]
对于定常超声流,信息沿下游传播,因此可以从初始数据线出发,沿 \(x\) 或 \(\xi\) 方向逐步推进。
这与前一章的时间推进不同。
这里的“推进变量”不是时间,而是空间坐标。
本章主线 ❷ 强守恒形式
控制方程采用强守恒形式:
\[ \frac{\partial F}{\partial x}= -\frac{\partial G}{\partial y} \]
在贴体坐标中变为:
\[ \frac{\partial F}{\partial \xi}= -\left[ \left(\frac{\partial\eta}{\partial x}\right) \frac{\partial F}{\partial\eta} + \frac{1}{h} \frac{\partial G}{\partial\eta} \right] \]
强守恒形式使得数值方法直接推进通量变量 \(F_1,F_2,F_3,F_4\),
这对于波捕捉问题尤其重要。
本章主线 ❸ 贴体坐标
由于膨胀角后壁面发生倾斜,物理区域不是规则矩形。
因此引入变换:
\[ \xi=x,\qquad \eta=\frac{y-y_s(x)}{h(x)} \]
将物理区域映射到规则计算区域。
贴体坐标的作用是:
让复杂边界变成简单的坐标线。
本章主线 ❹ 波捕捉与人工粘性
本章捕捉的是膨胀波,而不是激波。
但仍然可以看到波捕捉方法的基本特点:
- 使用守恒形式
- 允许波系在网格中自然展开
- 在奇异点附近加入人工粘性
- 通过解析解检查结果
人工粘性主要用于膨胀角附近,
远离奇异点后其作用可以很小。
本章主线 ❺ 壁面边界条件
无粘壁面条件为:
\[ \mathbf{V}\cdot\mathbf{n}=0 \]
即速度与壁面相切。
教材采用 Abbott 的壁面处理方法,通过局部 Prandtl–Meyer 修正,使壁面速度满足切向条件。
边界条件看似只是局部处理,
但在下游推进问题中,边界误差会沿流向传播和积累。
本章路线图
❶ 控制方程
二维定常 Euler 方程
强守恒形式
❷ 网格生成
贴体坐标
物理平面到计算平面
❸ 波捕捉
MacCormack 空间推进
预测—校正格式
❹ 人工粘性
抑制奇异点附近振荡
稳定数值解
❺ 壁面条件
Abbett 方法
速度切向修正
❻ 解析验证
Prandtl–Meyer 解
误差评估