流体力学核心贯通课 II
2025–2026 学年第二学期
北京理工大学 空天科学与技术学院
任杰
第2章 数值方法与网格变换
参考书
John D. Anderson Computational Fluid Dynamics: The Basics with Applications
McGraw-Hill, 1995任玉新 陈海昕
计算流体力学基础 清华大学出版社,2006张德良
计算流体力学教程 高等教育出版社,2010蔡庆东
计算流体动力学 北京大学本科生研究生专业基础课讲义,2018
真正理解 CFD 的最好方式,是自己实现数值算法并运行计算 - John D. Anderson
2.1 离散化 ❶ 基本定义和网格
定义:
- 离散化(Discretization):用有限信息逼近无限连续
- 将连续问题(continuous problem)转化为离散问题(discrete problem)
\[ \frac{\partial u}{\partial x} \rightarrow \frac{u_{i+1}-u_i}{\Delta x} \]
| 类型 | 特点 |
|---|---|
| 连续解(Analytical) | 在整个空间域 \((x,y)\) 求解 |
| 数值解(Numerical) | 只在有限网格点(grid points)上求解 |
➡ 微分算子 → 差分算子
➡ PDE → 代数方程组
2.1 离散化 ❶ 基本定义和网格
结构化网格与非结构化网格 Structured vs Unstructured
| 结构网格 | 非结构网格 | |
|---|---|---|
| 规则性 | 强 | 弱 |
| 编号方式 | (i,j,k) | 无规则 |
| 适用几何 | 相对简单 | 复杂 |
2.1 离散化 ❶ 基本定义和网格
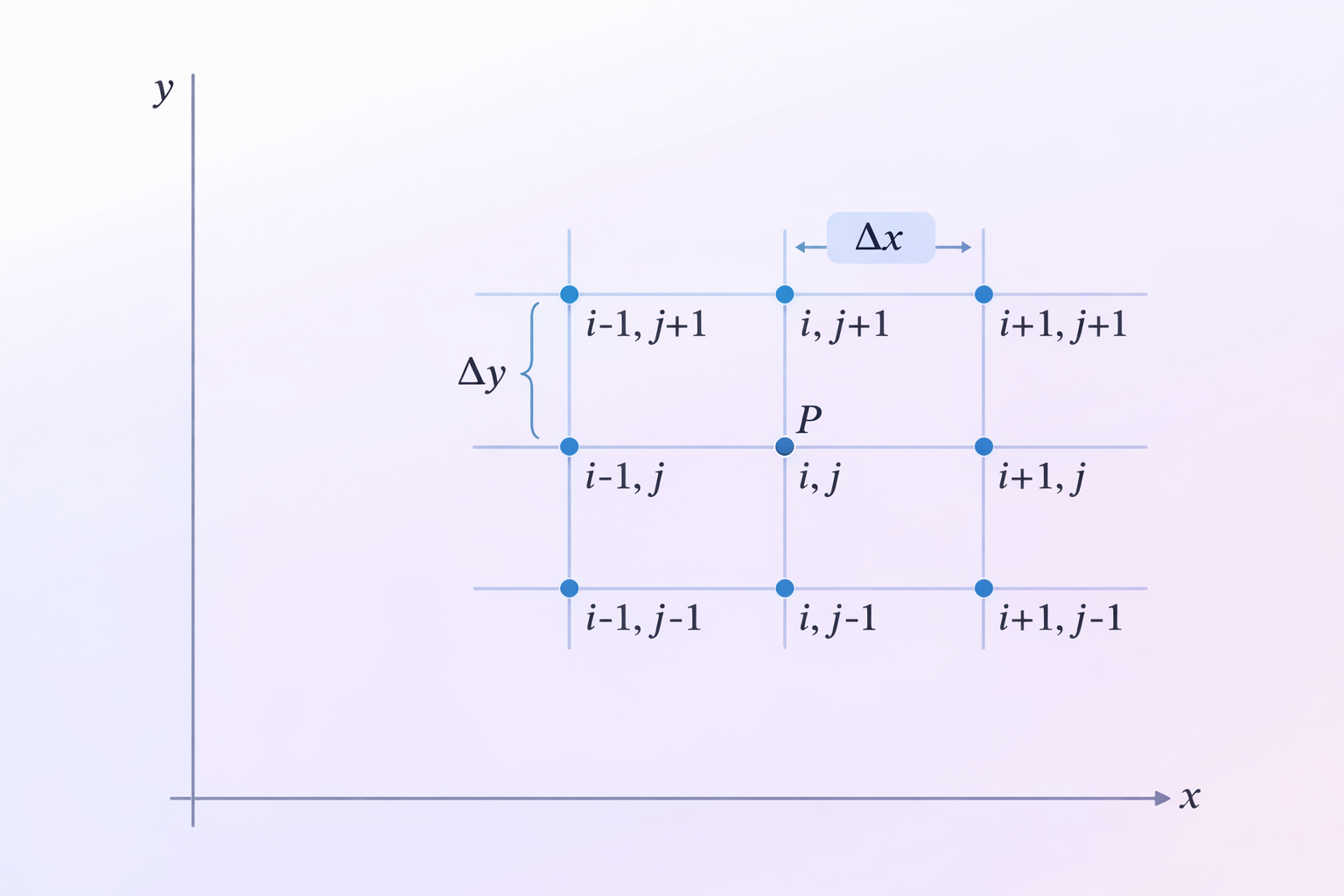
首先考虑结构化网格
坐标索引: \[ (i,j) \]
相邻点:
- 右:\((i+1,j)\)
- 左:\((i-1,j)\)
- 上:\((i,j+1)\)
- 下:\((i,j-1)\)
💻 代码演示
ShowMesh.m
2.1 离散化 ❷ 有限差分格式
设函数 \(u(x)\),在 \(x_i\) 处Taylor展开:
\[ u_{i+1} = u_i + \left(\frac{\partial u}{\partial x}\right)_i \Delta x + \frac{1}{2!}\left(\frac{\partial^2 u}{\partial x^2}\right)_i (\Delta x)^2 + \frac{1}{3!}\left(\frac{\partial^3 u}{\partial x^3}\right)_i (\Delta x)^3 + \cdots \]
泰勒展开 = “无限精确”的表达
示例
\[ f(x) = \sin(2\pi x) \]
已知 \(f(0.2)\) 求 \(f(0.2+0.02)\)
- 仅用第一项 \(f(0.22) \approx f(0.2)\),误差 ≈ 3.176%
- 加入一阶导数 \(f(0.22) \approx f(0.2) + f'(0.2)\times0.02\),误差 ≈ 0.775%
- 加入二阶导数 \(f(0.22) \approx f(0.2) + f'(0.2)\times0.02 + \frac{f''(0.2)}{2}\times(0.02)^2\),误差 ≈ 0.01%
💻 代码演示
ShowTaylor.m
2.1 离散化 ❷ 有限差分格式
从泰勒展开到有限差分
向前差分(Forward Difference)
\[ \left(\frac{\partial u}{\partial x}\right)_i = \frac{u_{i+1}-u_i}{\Delta x} +O(\Delta x) \]
向后差分(Backward Difference)
\[ \left(\frac{\partial u}{\partial x}\right)_i = \frac{u_i-u_{i-1}}{\Delta x}+O(\Delta x) \]
中心差分(Central Difference)
\[ \left(\frac{\partial u}{\partial x}\right)_i = \frac{u_{i+1}-u_{i-1}}{2\Delta x}+O(\Delta x^2) \]
💻 代码演示
Scheme1.m
2.1 离散化 ❷ 有限差分格式
差分格式推导:以中心差分为例
在点 \(x_i\) 处,对 \(u_{i+1}\) 和 \(u_{i-1}\) 分别做泰勒展开:
\[ u_{i+1} = u_i + u'_i \Delta x + \frac{1}{2}u''_i (\Delta x)^2 + \frac{1}{6}u'''_i (\Delta x)^3 + O(\Delta x^4) \]
\[ u_{i-1} = u_i - u'_i \Delta x + \frac{1}{2}u''_i (\Delta x)^2 - \frac{1}{6}u'''_i (\Delta x)^3 + O(\Delta x^4) \]
将两式相减(消去了全部偶次项):
\[ u_{i+1} - u_{i-1} = 2 u'_i \Delta x + \frac{1}{3}u'''_i (\Delta x)^3 + O(\Delta x^5) \]
整理得:
\[ \left(\frac{\partial u}{\partial x}\right)_i = \frac{u_{i+1} - u_{i-1}}{2\Delta x} + O(\Delta x^2) \]
2.1 离散化 ❷ 有限差分格式
二阶前向差分
\[ \left(\frac{\partial u}{\partial x}\right)_i= \frac{-3u_i + 4u_{i+1} - u_{i+2}}{2\Delta x}+ O(\Delta x^2) \]
四阶中心差分
\[ \left(\frac{\partial u}{\partial x}\right)_i= \frac{-u_{i+2} + 8u_{i+1} - 8u_{i-1} + u_{i-2}}{12\Delta x}+ O(\Delta x^4) \]
五阶迎风偏置差分
\[ \left(\frac{\partial u}{\partial x}\right)_i=\frac{-2u_{i-3}+15u_{i-2}-60u_{i-1}+20u_i+30u_{i+1}-3u_{i+2}}{60\Delta x}+ O(\Delta x^5) \]
六阶中心差分?
\[ \left(\frac{\partial u}{\partial x}\right)_i= \frac{-u_{i+3} + 9u_{i+2} - 45u_{i+1} + 45u_{i-1} - 9u_{i-2} + u_{i-3}}{60\Delta x}+ O(\Delta x^6) \]
2.1 离散化 ❷ 有限差分格式
六阶中心差分?
\[ \left(\frac{\partial u}{\partial x}\right)_i= \frac{-u_{i+3} + 9u_{i+2} - 45u_{i+1} + 45u_{i-1} - 9u_{i-2} + u_{i-3}}{60\Delta x}+ O(\Delta x^6) \]
- 用线性函数(\(u = x\))检验差分格式
设:\(u(x) = x\),则:\(\frac{du}{dx} = 1\)
- 网格表示
设:\(x_i = i\Delta x\),则:\(u_i = x_i = i\Delta x\)
- 代入:
\[ \frac{-(i+3)\Delta x+ 9(i+2)\Delta x- 45(i+1)\Delta x + 45(i-1)\Delta x- 9(i-2)\Delta x+ (i-3)\Delta x}{60\Delta x}=-1 \]
- 该差分格式给出的结果是 \(-1\),它实际近似的是 \(-\frac{\partial u}{\partial x}\)
2.1 离散化 ❷ 有限差分格式
六阶中心差分 ❌ 错误形式
\[ \left(\frac{\partial u}{\partial x}\right)_i= \frac{-u_{i+3} + 9u_{i+2} - 45u_{i+1} + 45u_{i-1} - 9u_{i-2} + u_{i-3}}{60\Delta x}+ O(\Delta x^6) \]
六阶中心差分
\[ \left(\frac{\partial u}{\partial x}\right)_i=\frac{-u_{i-3}+9u_{i-2}-45u_{i-1}+45u_{i+1}-9u_{i+2}+u_{i+3}}{60\Delta x}+ O(\Delta x^6) \]
精度 ↑ ⇒ stencil变宽 ⇒ 需要更多点 ⇒ 对边界更敏感
💻 代码演示
Scheme2.m
2.1 离散化 ❷ 有限差分格式
二阶导数差分格式
二阶精度(3点中心差分)
\[ \left(\frac{\partial^2 u}{\partial x^2}\right)_i= \frac{u_{i+1} - 2u_i + u_{i-1}}{(\Delta x)^2}+ O(\Delta x^2) \]
四阶精度(5点中心差分)
\[ \left(\frac{\partial^2 u}{\partial x^2}\right)_i= \frac{-u_{i+2} + 16u_{i+1} - 30u_i + 16u_{i-1} - u_{i-2}}{12(\Delta x)^2}+ O(\Delta x^4) \]
六阶精度(7点中心差分)
\[ \left(\frac{\partial^2 u}{\partial x^2}\right)_i= \frac{2u_{i+3} - 27u_{i+2} + 270u_{i+1} - 490u_i + 270u_{i-1} - 27u_{i-2} + 2u_{i-3}}{180(\Delta x)^2}+ O(\Delta x^6) \]
💻 代码演示
DeriveScheme.m
2.1 离散化 ❷ 有限差分格式
二阶导数差分格式
二阶精度前向差分(4点)
\[ \left(\frac{\partial^2 u}{\partial x^2}\right)_i= \frac{2u_i - 5u_{i+1} + 4u_{i+2} - u_{i+3}}{(\Delta x)^2}+ O(\Delta x^2) \]
四阶精度前向差分(6点)
\[ \left(\frac{\partial^2 u}{\partial x^2}\right)_i= \frac{45u_i - 154u_{i+1} + 214u_{i+2} - 156u_{i+3} + 61u_{i+4} - 10u_{i+5}}{12(\Delta x)^2}+ O(\Delta x^4) \]
混合导数
\[ \frac{\partial^2 u}{\partial x \partial y}\approx \frac{u_{i+1,j+1}-u_{i+1,j-1}-u_{i-1,j+1}+u_{i-1,j-1}}{4\Delta x \Delta y}+O(\Delta x^2,\Delta y^2) \]
2.1 离散化 ❸ 紧致差分格式
回顾普通中心差分:
| 精度 | stencil |
|---|---|
| 二阶 | 3点 |
| 四阶 | 5点 |
| 六阶 | 7点 |
问题:
- 精度越高 → stencil越宽
- 边界难处理
- 并行效率下降
紧致格式 = 用更少的网格点,获得更高精度的差分格式 👉 “用隐式关系换精度”
2.1 离散化 ❸ 紧致差分格式
普通差分(显式):
\[ u'_i = \frac{u_{i+1} - u_{i-1}}{2\Delta x} \]
紧致格式(隐式):
\[ a u'_{i-1} + u'_i + a u'_{i+1} = \frac{b(u_{i+1} - u_{i-1})}{2\Delta x} \]
👉 导数之间也建立关系! 例:四阶紧致格式
\[ \frac{1}{4}u'_{i-1} + u'_i + \frac{1}{4}u'_{i+1}= \frac{3}{4}\frac{u_{i+1} - u_{i-1}}{\Delta x}+O(\Delta x^4) \]
- 只用 3个点(i-1, i, i+1) 却达到 四阶精度
2.1 离散化 ❸ 紧致差分格式
下面给出其推导过程
\[ \frac{1}{4}u'_{i-1} + u'_i + \frac{1}{4}u'_{i+1} = \frac{3}{4}\frac{u_{i+1}-u_{i-1}}{\Delta x} + O(\Delta x^4) \]
在 \(x_i\) 处对两侧各项作 Taylor 展开,记步长为 \(\Delta x\)。
\[ u'_{i-1}= u'_i - \Delta x\,u''_i + \frac{\Delta x^2}{2}u'''_i- \frac{\Delta x^3}{6}u^{(4)}_i+ \frac{\Delta x^4}{24}u^{(5)}_i + O(\Delta x^5) \]
\[ u'_{i+1}= u'_i + \Delta x\,u''_i + \frac{\Delta x^2}{2}u'''_i+ \frac{\Delta x^3}{6}u^{(4)}_i+ \frac{\Delta x^4}{24}u^{(5)}_i + O(\Delta x^5) \]
因此,
\[ u'_{i-1}+u'_{i+1} = 2u'_i + \Delta x^2 u'''_i + \frac{\Delta x^4}{12}u^{(5)}_i + O(\Delta x^6) \]
2.1 离散化 ❸ 紧致差分格式
再乘上 \(\frac14\),得到
\[ \frac14 u'_{i-1} + \frac14 u'_{i+1} = \frac12 u'_i + \frac14 \Delta x^2 u'''_i + \frac{1}{48}\Delta x^4 u^{(5)}_i + O(\Delta x^6) \]
于是左端为
\[ \frac14 u'_{i-1} + u'_i + \frac14 u'_{i+1} = \frac32 u'_i + \frac14 \Delta x^2 u'''_i + \frac{1}{48}\Delta x^4 u^{(5)}_i + O(\Delta x^6) \]
展开右端项 \(u_{i+1}\) 与 \(u_{i-1}\):
\[ u_{i+1}= u_i + \Delta x\,u'_i + \frac{\Delta x^2}{2}u''_i+ \frac{\Delta x^3}{6}u'''_i+ \frac{\Delta x^4}{24}u^{(4)}_i+ \frac{\Delta x^5}{120}u^{(5)}_i + O(\Delta x^6) \]
\[ u_{i-1}= u_i - \Delta x\,u'_i + \frac{\Delta x^2}{2}u''_i- \frac{\Delta x^3}{6}u'''_i+ \frac{\Delta x^4}{24}u^{(4)}_i- \frac{\Delta x^5}{120}u^{(5)}_i + O(\Delta x^6) \]
2.1 离散化 ❸ 紧致差分格式
两式相减得
\[ u_{i+1}-u_{i-1} = 2\Delta x\,u'_i + \frac{\Delta x^3}{3}u'''_i + \frac{\Delta x^5}{60}u^{(5)}_i + O(\Delta x^7) \]
两边除以 \(\Delta x\):
\[ \frac{u_{i+1}-u_{i-1}}{\Delta x} = 2u'_i + \frac{\Delta x^2}{3}u'''_i + \frac{\Delta x^4}{60}u^{(5)}_i + O(\Delta x^6) \]
再乘上 \(\frac34\),得到右端
\[ \frac34 \frac{u_{i+1}-u_{i-1}}{\Delta x} = \frac32 u'_i + \frac14 \Delta x^2 u'''_i + \frac{1}{80}\Delta x^4 u^{(5)}_i + O(\Delta x^6) \]
2.1 离散化 ❸ 紧致差分格式
比较左右两端。左端展开为
\[ \frac14 u'_{i-1} + u'_i + \frac14 u'_{i+1}= \frac32 u'_i + \frac14 \Delta x^2 u'''_i + \frac{1}{48}\Delta x^4 u^{(5)}_i + O(\Delta x^6) \]
右端展开为
\[ \frac34 \frac{u_{i+1}-u_{i-1}}{\Delta x}= \frac32 u'_i + \frac14 \Delta x^2 u'''_i + \frac{1}{80}\Delta x^4 u^{(5)}_i + O(\Delta x^6) \]
可见两端在 \(u'_i\) 和 \(\Delta x^2 u'''_i\) 项上完全一致,故其差为
\[ \left(\frac{1}{48}-\frac{1}{80}\right)\Delta x^4 u^{(5)}_i + O(\Delta x^6)= \frac{1}{120}\Delta x^4 u^{(5)}_i + O(\Delta x^6) \]
因此该格式的截断误差为
\[ O(\Delta x^4) \]
即得到四阶精度格式
\[ \frac{1}{4}u'_{i-1} + u'_i + \frac{1}{4}u'_{i+1}= \frac{3}{4}\frac{u_{i+1} - u_{i-1}}{\Delta x}+O(\Delta x^4) \]
2.1 离散化 ❸ 紧致差分格式
评注
紧致差分格式(compact finite difference scheme)的特点:
- 左端包含未知导数 \(u'_{i-1},u'_i,u'_{i+1}\);
- 右端只用到相邻点函数值 \(u_{i-1},u_{i+1}\);
- 只用三点模板就能达到四阶精度,因此比普通显式差分格式更“紧致”。
若写成求解形式,则对所有内部点可组成一个三对角线性方程组,再求得全部 \(u'_i\)。
2.1 离散化 ❸ 紧致差分格式
| 方法 | 点数 | 精度 |
|---|---|---|
| 中心差分 | 5点 | 四阶 |
| 紧致格式 | 3点 | 四阶 |
本质:需要解线性方程组
把所有点写出来:
\[ \begin{cases} \frac{1}{4}u'_0 + u'_1 + \frac{1}{4}u'_2 = RHS_1 \\ \frac{1}{4}u'_1 + u'_2 + \frac{1}{4}u'_3 = RHS_2 \\ \cdots \end{cases} \]
👉 形成:\(A \mathbf{u'} = \mathbf{b}\)
2.1 离散化 ❸ 紧致差分格式
给定四阶紧致差分格式:
\[ \frac{1}{4}u'_{i-1} + u'_i + \frac{1}{4}u'_{i+1} = \frac{3}{4}\frac{u_{i+1} - u_{i-1}}{\Delta x} \]
\[ \begin{cases} \frac{1}{4}u'_0 + u'_1 + \frac{1}{4}u'_2= \frac{3}{4}\frac{u_2 - u_0}{\Delta x} \\[8pt] \frac{1}{4}u'_1 + u'_2 + \frac{1}{4}u'_3= \frac{3}{4}\frac{u_3 - u_1}{\Delta x} \\[8pt] \frac{1}{4}u'_2 + u'_3 + \frac{1}{4}u'_4= \frac{3}{4}\frac{u_4 - u_2}{\Delta x} \\[6pt] \qquad \vdots \\[6pt] \frac{1}{4}u'_{i-1} + u'_i + \frac{1}{4}u'_{i+1}= \frac{3}{4}\frac{u_{i+1} - u_{i-1}}{\Delta x} \\[6pt] \qquad \vdots \end{cases} \]
2.1 离散化 ❸ 紧致差分格式
写成统一矩阵形式(便于数值实现)
\[ \begin{bmatrix} 1 & \tfrac{1}{4} & 0 & \cdots & 0 \\ \tfrac{1}{4} & 1 & \tfrac{1}{4} & \cdots & 0 \\ 0 & \tfrac{1}{4} & 1 & \tfrac{1}{4} & 0 \\ \vdots & \vdots & \vdots & \ddots & \vdots \\ 0 & \cdots & 0 & \tfrac{1}{4} & 1 \end{bmatrix} \begin{bmatrix} u'_1 \\ u'_2 \\ u'_3 \\ \vdots \\ u'_{N-1} \end{bmatrix}= \begin{bmatrix} \frac{3}{4}\frac{u_2-u_0}{\Delta x} \\ \frac{3}{4}\frac{u_3-u_1}{\Delta x} \\ \frac{3}{4}\frac{u_4-u_2}{\Delta x} \\ \vdots \\ \frac{3}{4}\frac{u_N-u_{N-2}}{\Delta x} \end{bmatrix} \]
- RHS 是显式中心差分(但带权系数)
- LHS 是隐式三对角耦合
- 常用于DNS/LES
💻 代码演示
Compact.m
2.1 离散化 ❸ 紧致差分格式
| 特性 | 普通差分 | 紧致格式 |
|---|---|---|
| 是否显式 | ✅ | ❌ |
| stencil | 宽 | 窄 |
| 精度 | 一般 | 高 |
| 是否需解方程 | ❌ | ✅ |
👉 物理意义(可以这样讲)
紧致格式 = 更接近“谱方法”的差分方法
- 对波动问题(CFD、声学、稳定性)特别好
- 能更准确捕捉高频信息
2.1 离散化 ❸ 紧致差分格式
⚠️ 常见误区
❌ 认为紧致格式更简单
→ 实际上需要解线性系统
❌ 认为一定更快
→ 小规模可能慢,但精度优势明显
❌ 忽略边界处理
→ 边界需要专门设计紧致格式
紧致格式通过引入导数之间的耦合关系,在保持紧 stencil 的同时显著提高精度,是连接有限差分与谱方法的重要桥梁。
2.1 离散化 ❸ 紧致差分格式
四阶精度的二阶导数中心紧致格式
\[ \frac{1}{10}u''_{i-1} + u''_i + \frac{1}{10}u''_{i+1}= \frac{6}{5}\frac{u_{i-1} - 2u_i + u_{i+1}}{\Delta x^2}+ O(\Delta x^4) \]
其中:
- 左侧包含相邻节点的二阶导数项,因此这是一个隐式紧致格式
- 右侧采用三点中心差分形式
- 该格式整体达到 四阶精度
对内部节点 \(i=2,\dots,N-1\),可写成
\[ A \mathbf{u}'' = \mathbf{rhs} \]
2.1 离散化 ❸ 紧致差分格式
其中矩阵 \(A\) 为三对角矩阵:
\[ A= \begin{pmatrix} 1 & 0 & 0 & \cdots & 0 \\ \frac{1}{10} & 1 & \frac{1}{10} & \cdots & 0 \\ 0 & \frac{1}{10} & 1 & \frac{1}{10} & 0 \\ \vdots & \vdots & \vdots & \ddots & \vdots \\ 0 & \cdots & 0 & 0 & 1 \end{pmatrix} \]
右端项内部节点为
\[ \mathbf{rhs}_i= \frac{6}{5}\frac{u_{i-1}-2u_i+u_{i+1}}{\Delta x^2}, \qquad i=2,\dots,N-1 \]
边界点通常需要结合边界格式单独处理。
2.1 离散化 ❹ 讨论与小结
需要特别注意的是,当控制方程以如下形式书写时,即使对于粘性流动,所需的也仅是一阶导数。
\[ \frac{\partial \mathbf{U}}{\partial t}+\frac{\partial \mathbf{F}}{\partial x}+\frac{\partial \mathbf{G}}{\partial y}+\frac{\partial \mathbf{H}}{\partial z}= \mathbf{J} \]
- 进一步地,\(F\)、\(G\) 和 \(H\) 中的一些项包含粘性应力以及热传导项。这些物理量依赖于速度或温度的梯度,而这些梯度本身也是一阶导数。因此,对于这些粘性项,同样可以使用一阶导数的有限差分格式进行离散。通过这种方式,可以避免使用二阶导数的有限差分格式!
- 我们这里要强调的是:可以构造出几乎无限多种有限差分表达式,并且其精度可以不断提高。过去,在大多数计算流体力学(CFD)应用中,二阶精度通常被认为已经足够,因此我们课堂上推导的这些差分格式一直是最常用的形式。关于高阶精度的优缺点如下:
2.1 离散化 ❹ 讨论与小结
- 缺点(con):更高阶精度的差分格式通常需要更多的网格点,因此在每一个时间步或空间步中,会增加计算机的计算量。
- 优点(pro):相比之下,高阶差分格式可能只需要更少的总体网格点,就可以获得相当的整体精度。高阶差分格式通常可以得到“质量更高”的数值解,例如捕捉到更清晰、更尖锐的激波结构。这一方面目前仍是CFD领域的研究热点。
基于以上原因,对于不同CFD问题究竟应采用何种精度,并不存在一个绝对明确的答案。二阶精度在绝大多数CFD应用中已被广泛接受。
2.1 离散化 ❹ 讨论与小结
边界如何处理?
在内部点,我们可以用中心差分:
\[ \frac{\partial u}{\partial y}\Big|_i \approx \frac{u_{i+1}-u_{i-1}}{2\Delta y} \]
但在边界:没有 \(i-1\),无法使用中心差分。👉 思路:单边差分(One-sided difference)
一阶精度(前向差分)
\[ \left(\frac{\partial u}{\partial y}\right)_1= \frac{u_2 - u_1}{\Delta y}+ O(\Delta y) \]
二阶精度单边差分(重点)
\[ \left(\frac{\partial u}{\partial y}\right)_1= \frac{-3u_1 + 4u_2 - u_3}{2\Delta y}+ O(\Delta y^2) \]
边界处理质量 = CFD精度关键来源之一
2.1 离散化 ❹ 讨论与小结
边界如何处理?
在粘性流动中,壁面剪切应力:
\[ \tau_w = \mu \left(\frac{\partial u}{\partial y}\right)_w \]
壁面热流:
\[ q_w = k \left(\frac{\partial T}{\partial y}\right)_w \]
👉 导数越准确 → 剪切应力 / 热流越准确
2.1 离散化 ❹ 讨论与小结
边界如何处理?
👉 例 给定:\(u = 1582(1 - e^{-y/L})\)
网格:
| y | u |
|---|---|
| 0 | 0 |
| 0.1 | 150.54 |
| 0.2 | 286.77 |
| 0.3 | 410.03 |
精确解
\[ \left.\left(\frac{\partial u}{\partial y}\right)\right|_{y=0}= 1582 \]
- 一阶差分
\[ \left.\left(\frac{\partial u}{\partial y}\right)\right|_{y=0}= \frac{u_2-u_1}{\Delta y}=1505.4 \]
- 二阶单边差分
\[ \left.\left(\frac{\partial u}{\partial y}\right)\right|_{y=0}= \frac{-3u_1 + 4u_2 - u_3}{2\Delta y}=1577.0 \]
- 三阶差分(更高阶)
\[ \left.\left(\frac{\partial u}{\partial y}\right)\right|_{y=0}= \frac{-11u_1 + 18u_2 - 9u_3 + 2u_4}{6\Delta y}=1581.4 \]
2.1 离散化 ❹ 讨论与小结
本节应掌握的知识点
- Taylor展开
- 基本差分格式推导 (所有模板点Taylor展开的组合)
- 紧致格式(用隐式关系换精度)
- 边界处理(在边界采用单边差分)
小测试
2.2 显式/隐式格式 ❶ 差分方程与微分方程的一致性
考虑一维热传导方程 \(\frac{\partial T}{\partial t} = \alpha \frac{\partial^2 T}{\partial x^2}\)
时间(前向差分): \[ \frac{\partial T}{\partial t} =\frac{T_i^{n+1}-T_i^n}{\Delta t}+O(\Delta t) \]
空间(中心差分): \[ \frac{\partial^2 T}{\partial x^2}=\frac{T_{i+1}^n - 2T_i^n + T_{i-1}^n}{(\Delta x)^2}+O((\Delta x)^2) \]
得到差分方程:
\[ \frac{T_i^{n+1}-T_i^n}{\Delta t}=\alpha \frac{T_{i+1}^n - 2T_i^n + T_{i-1}^n}{(\Delta x)^2} \]
2.2 显式/隐式格式 ❶ 差分方程与微分方程的一致性
⚠️ 重要概念 差分方程 ≠ 原微分方程
- 是近似
- 存在截断误差
定义一致性(Consistency)
当: \[ \Delta x \to 0,\quad \Delta t \to 0 \]
👉 差分方程 → 原方程
2.2 显式/隐式格式 ❷ 求解思路
\[\frac{\partial T}{\partial t} = \alpha \frac{\partial^2 T}{\partial x^2}\]
显式方法(Explicit)
\[ T_i^{n+1} = T_i^n + \alpha \frac{\Delta t}{(\Delta x)^2}(T_{i+1}^n - 2T_i^n + T_{i-1}^n) \]
隐式方法(Implicit)
\[ T_i^{n+1} = T_i^n + \alpha \frac{\Delta t}{(\Delta x)^2}(T_{i+1}^{(n+1)} - 2T_i^{(n+1)} + T_{i-1}^{(n+1)}) \]
Crank–Nicolson格式(Implicit)
\[ \frac{T_i^{n+1} - T_i^n}{\Delta t}=\alpha \frac{1}{2}\left[\frac{T_{i+1}^{n} - 2T_i^{n} + T_{i-1}^{n}}{(\Delta x)^2}+\frac{T_{i+1}^{n+1} - 2T_i^{n+1} + T_{i-1}^{n+1}}{(\Delta x)^2}\right] \]
2.2 显式/隐式格式 ❷ 求解思路
👉 Crank–Nicolson格式
\[ \frac{T_i^{n+1} - T_i^n}{\Delta t}=\alpha \frac{1}{2}\left[\frac{T_{i+1}^{n} - 2T_i^{n} + T_{i-1}^{n}}{(\Delta x)^2}+\frac{T_{i+1}^{n+1} - 2T_i^{n+1} + T_{i-1}^{n+1}}{(\Delta x)^2}\right] \]
隐式方法未知量:\(T_{i-1}^{n+1}\)、\(T_i^{n+1}\)、\(T_{i+1}^{n+1}\)
👉 一个方程多个未知数、不能逐点计算、必须:同时求解整个网格系统
\[ A T_{i-1}^{n+1} - B T_i^{n+1} + A T_{i+1}^{n+1} = K_i \]
其中
\[ A=\frac{\alpha \Delta t}{2(\Delta x)^2}, \qquad B=1+\frac{\alpha \Delta t}{(\Delta x)^2}, \qquad K_i=-T_i^n-\frac{\alpha \Delta t}{2(\Delta x)^2}\left(T_{i+1}^n-2T_i^n+T_{i-1}^n\right) \]
2.2 显式/隐式格式 ❷ 求解思路
\[ A T_{i-1}^{n+1} - B T_i^{n+1} + A T_{i+1}^{n+1} = K_i \]
若考虑一维区间上共有 \(7\) 个网格点,其中边界点 \(1\) 和 \(7\) 已知,则未知量为
\[ T_2^{n+1},\; T_3^{n+1},\; T_4^{n+1},\; T_5^{n+1},\; T_6^{n+1} \]
于是线性方程组可写成:
\[ \begin{aligned} -BT_2^{n+1}+AT_3^{n+1} &= K_2-AT_1^{n+1},\\ AT_2^{n+1}-BT_3^{n+1}+AT_4^{n+1} &= K_3,\\ AT_3^{n+1}-BT_4^{n+1}+AT_5^{n+1} &= K_4,\\ AT_4^{n+1}-BT_5^{n+1}+AT_6^{n+1} &= K_5,\\ AT_5^{n+1}-BT_6^{n+1} &= K_6-AT_7^{n+1}. \end{aligned} \]
2.2 显式/隐式格式 ❷ 求解思路
写成矩阵形式
\[ \begin{bmatrix} -B & A & 0 & 0 & 0 \\ A & -B & A & 0 & 0 \\ 0 & A & -B & A & 0 \\ 0 & 0 & A & -B & A \\ 0 & 0 & 0 & A & -B \end{bmatrix} \begin{bmatrix} T_2^{n+1}\\ T_3^{n+1}\\ T_4^{n+1}\\ T_5^{n+1}\\ T_6^{n+1} \end{bmatrix}= \begin{bmatrix} K_2-AT_1^{n+1}\\ K_3\\ K_4\\ K_5\\ K_6-AT_7^{n+1} \end{bmatrix} \]
也可将右端向量记为
\[ \mathbf{K}= \begin{bmatrix} K_2'=K_2-AT_1^{n+1}\\ K_3\\ K_4\\ K_5\\ K_6'=K_6-AT_7^{n+1} \end{bmatrix} \]
2.2 显式/隐式格式 ❷ 求解思路
因此最终得到标准形式
\[ \mathbf{A}\mathbf{T}=\mathbf{K} \]
其中
\[ \mathbf{A}= \begin{bmatrix} -B & A & 0 & 0 & 0 \\ A & -B & A & 0 & 0 \\ 0 & A & -B & A & 0 \\ 0 & 0 & A & -B & A \\ 0 & 0 & 0 & A & -B \end{bmatrix}, \qquad \mathbf{T}= \begin{bmatrix} T_2^{n+1}\\ T_3^{n+1}\\ T_4^{n+1}\\ T_5^{n+1}\\ T_6^{n+1} \end{bmatrix}, \qquad \mathbf{K}= \begin{bmatrix} K_2'\\ K_3\\ K_4\\ K_5\\ K_6' \end{bmatrix} \]
说明
- 系数矩阵 \(\mathbf{A}\) 只在主对角线和两条相邻对角线上非零,因此称为三对角矩阵。
- 边界点 \(T_1^{n+1}\) 和 \(T_7^{n+1}\) 已知,因此被移入右端向量。
- 这类方程组通常可用 Thomas 算法(追赶法) 高效求解。
2.2 显式/隐式格式 ❷ 求解思路
显式 vs 隐式
既然显式方法更简单,为什么不一直使用显式方法?
👉 答案:稳定性约束
在差分格式中,会出现:
- 空间步长:\(\Delta x\)、时间步长:\(\Delta t\)
- 一旦 \(\Delta x\) 给定、\(\Delta t\) 不能任意选择
必须满足稳定性条件(如 CFL 条件),否则会发生:
- 数值变为无穷大
- 出现非法运算(如负数开方)
程序崩溃
💻 代码演示
Heat1Dv2.m
2.2 显式/隐式格式 ❷ 求解思路
显式 vs 隐式
时间推进(Time Marching):从已知时间层 \(n\) 推进到 \(n+1\)
稳态问题 通过时间推进逼近
非稳态问题 必须时间推进
| 特性 | 显式方法 | 隐式方法 |
|---|---|---|
| 计算方式 | 逐点 | 整体求解 |
| 稳定性 | 条件稳定 | 常无条件稳定 |
| 时间步长 | 很小 | 可较大 |
| 编程难度 | 简单 | 较复杂 |
| 计算成本 | 每步低 | 每步高 |
👉 不存在“最优方法”,只有:针对问题选择合适方法
2.2 显式/隐式格式 ❷ 求解思路
显式 vs 隐式
1969 年至约 1979 年期间:
- 绝大多数实际 CFD 计算都采用 显式方法(explicit methods)
1980年代:
- 隐式方法成为 CFD 的主流研究方向
如今:
- 计算机体系结构发生了重要变化,对于大规模并行计算(Massively Parallel Computing)可以在同一时刻处理:成千上万个网格点
- 👉 显式方法重新受到重视:
- ✔ 局部计算(local stencil)
- ✔ 无需求解大型线性方程组
- ✔ 极易并行化
2.3 误差与稳定性分析 ❶ 误差的来源与发展
- 截断误差(Discretization Error)👉 一致性问题
\[ \text{Discretization error} = A - D \]
- \(A\):微分方程精确解
- \(D\):差分方程精确解
- 舍入误差(Round-off Error)👉 稳定性问题
\[ \epsilon = N - D \]
- \(N\):计算机数值解
- 计算机解 = 理论离散解 + 数值误差
👉 舍入误差如何随时间演化 = 稳定性本质
2.3 误差与稳定性分析 ❶ 误差的来源与发展
\[ \epsilon = N - D \]
- \(N\):计算机数值解
- \(D\):差分方程精确解
- 若误差:不增长 / 衰减 → ✅ 稳定
- 若误差:增长 → ❌ 不稳定
对于热传导方程:
\[ \frac{\partial T}{\partial t} = \alpha \frac{\partial^2 T}{\partial x^2} \]
对应显式格式:
\[ \frac{T_i^{n+1} - T_i^n}{\Delta t}=\alpha \frac{T_{i+1}^n - 2T_i^n + T_{i-1}^n}{(\Delta x)^2} \]
2.3 误差与稳定性分析 ❶ 误差的来源与发展
显式格式:
\[ \frac{T_i^{n+1} - T_i^n}{\Delta t}=\alpha \frac{T_{i+1}^n - 2T_i^n + T_{i-1}^n}{(\Delta x)^2} \]
考虑数值解与精确解的分解:
\[ T_i^n = D_i^n + \epsilon_i^n \]
其中:
- \(D_i^n\):差分方程的精确解
- \(\epsilon_i^n\):数值误差
代入差分格式
\[ \frac{D_i^{n+1} + \epsilon_i^{n+1} - D_i^n - \epsilon_i^n}{\alpha \Delta t}=\frac{D_{i+1}^n + \epsilon_{i+1}^n - 2D_i^n - 2\epsilon_i^n + D_{i-1}^n + \epsilon_{i-1}^n}{(\Delta x)^2} \]
\(D\) 是差分方程的精确解,因此满足:
\[ \frac{D_i^{n+1} - D_i^n}{\alpha \Delta t}=\frac{D_{i+1}^n - 2D_i^n + D_{i-1}^n}{(\Delta x)^2} \]
2.3 误差与稳定性分析 ❶ 误差的来源与发展
\[ \frac{D_i^{n+1} + \epsilon_i^{n+1} - D_i^n - \epsilon_i^n}{\alpha \Delta t}=\frac{D_{i+1}^n + \epsilon_{i+1}^n - 2D_i^n - 2\epsilon_i^n + D_{i-1}^n + \epsilon_{i-1}^n}{(\Delta x)^2} \]
\[ \frac{D_i^{n+1} - D_i^n}{\alpha \Delta t}=\frac{D_{i+1}^n - 2D_i^n + D_{i-1}^n}{(\Delta x)^2} \]
两式相减
\[ \frac{\epsilon_i^{n+1} - \epsilon_i^n}{\alpha \Delta t}=\frac{\epsilon_{i+1}^n - 2\epsilon_i^n + \epsilon_{i-1}^n}{(\Delta x)^2} \]
👉 误差 \(\epsilon\):满足 与原方程完全相同形式的差分方程
👉 意味着:数值误差的传播规律 ≈ 物理量的传播规律
👉 这是:von Neumann 稳定性分析的起点
2.3 误差与稳定性分析 ❷ von Neumann 稳定性分析(Fourier模态分析)
我们从误差满足的差分方程出发:
\[ \frac{\epsilon_i^{n+1} - \epsilon_i^n}{\Delta t}=\alpha \frac{\epsilon_{i+1}^n - 2\epsilon_i^n + \epsilon_{i-1}^n}{(\Delta x)^2} \]
误差的 Fourier 展开:
\[ \epsilon_i^n=\epsilon(x_i,t_n) = \sum_m A_m(t_n) e^{i k_m x_i} \]
进一步假设时间指数增长:
\[ \epsilon_i^n = \sum_m e^{a_m t_n} e^{i k_m x_i} \]
由于方程是线性的:👉 每个模态可以独立分析,对单一模态:
\[ \epsilon_i^n = e^{a t_n} e^{i k x_i} \]
2.3 误差与稳定性分析 ❷ von Neumann 稳定性分析(Fourier模态分析)
\[\epsilon_i^n = e^{a t_n} e^{i k x_i}\]
代入差分方程
\[ \frac{\epsilon_i^{n+1} - \epsilon_i^n}{\Delta t}=\alpha \frac{\epsilon_{i+1}^n - 2\epsilon_i^n + \epsilon_{i-1}^n}{(\Delta x)^2} \]
时间推进项
\[ \epsilon_i^{n+1} = e^{a (t_n+\Delta t)} e^{i k x_i}= e^{a \Delta t} \epsilon_i^n \]
空间项
\[ \epsilon_{i+1}^n = \epsilon_i^n e^{i k \Delta x} \]
\[ \epsilon_{i-1}^n = \epsilon_i^n e^{-i k \Delta x} \]
方程左边:
\[ \frac{\epsilon_i^{n+1} - \epsilon_i^n}{\Delta t}=\frac{\epsilon_i^n (e^{a \Delta t} - 1)}{\Delta t} \]
方程右边:
\[ \alpha \frac{\epsilon_i^n (e^{ik\Delta x} - 2 + e^{-ik\Delta x})}{(\Delta x)^2} \]
约去公共项 \(\epsilon_i^n\) 得到:
\[ \frac{e^{a \Delta t} - 1}{\Delta t}=\alpha \frac{e^{ik\Delta x} - 2 + e^{-ik\Delta x}}{(\Delta x)^2} \]
2.3 误差与稳定性分析 ❷ von Neumann 稳定性分析(Fourier模态分析)
\[ \frac{e^{a \Delta t} - 1}{\Delta t}=\alpha \frac{e^{ik\Delta x} - 2 + e^{-ik\Delta x}}{(\Delta x)^2} \]
其中:
\[ e^{ik\Delta x} - 2 + e^{-ik\Delta x} = 2[\cos(k\Delta x) - 1] \]
进一步用:
\[ \cos\theta - 1 = -2 \sin^2\left(\frac{\theta}{2}\right) \]
得到:
\[ e^{ik\Delta x} - 2 + e^{-ik\Delta x}= -4 \sin^2\left(\frac{k\Delta x}{2}\right) \]
方程化简为
\[ \frac{e^{a \Delta t} - 1}{\Delta t}=- \frac{4\alpha}{(\Delta x)^2}\sin^2\left(\frac{k\Delta x}{2}\right) \]
整理得到:
\[ e^{a \Delta t}=1 - \frac{4\alpha \Delta t}{(\Delta x)^2}\sin^2\left(\frac{k\Delta x}{2}\right) \]
2.3 误差与稳定性分析 ❷ von Neumann 稳定性分析(Fourier模态分析)
放大因子定义:
\[ G = \left|\frac{\epsilon^{n+1}}{\epsilon^n}\right|=\left|e^{a \Delta t}\right|=\left|1 - \frac{4\alpha \Delta t}{(\Delta x)^2}\sin^2\left(\frac{k\Delta x}{2}\right)\right| \]
稳定性条件
\[ G \le 1 \]
因此,需要满足
\[ 1 - \frac{4\alpha \Delta t}{(\Delta x)^2}\sin^2 \left( \frac{k \Delta x}{2} \right)\le 1\Longrightarrow\frac{4\alpha \Delta t}{(\Delta x)^2}\sin^2 \left( \frac{k \Delta x}{2} \right)\ge 0 (自动满足) \]
同时需要满足
\[ 1 - \frac{4\alpha \Delta t}{(\Delta x)^2}\sin^2 \left( \frac{k \Delta x}{2} \right)\ge -1\Longrightarrow\frac{4\alpha \Delta t}{(\Delta x)^2}\sin^2 \left( \frac{k \Delta x}{2} \right)\le 2 \]
2.3 误差与稳定性分析 ❷ von Neumann 稳定性分析(Fourier模态分析)
\[ \frac{4\alpha \Delta t}{(\Delta x)^2}\sin^2 \left( \frac{k_m \Delta x}{2} \right)\le 2 \]
由于:
\[ \sin^2 \left( \frac{k_m \Delta x}{2} \right) \le 1 \]
👉 最不利情况:
\[ \sin^2(\cdot) = 1 \]
因此得到最终稳定性条件:
\[ \frac{4\alpha \Delta t}{(\Delta x)^2} \le 2 \Longrightarrow \colorbox{yellow}{$\displaystyle \textcolor{black}{\frac{\alpha \Delta t}{(\Delta x)^2} \le \frac{1}{2}}$} \]
💻 代码演示
Heat1Dv2.m
2.3 误差与稳定性分析 ❷ von Neumann 稳定性分析(Fourier模态分析)
物理与数值意义
- 对于给定 \(\Delta x\)
- 时间步长 \(\Delta t\) 必须足够小 👉 CFL条件(Courant-Friedrichs-Lewy条件)
von Neumann 稳定性分析方法
- 基于 Fourier 模态(“误差波”);稳定性 = 这些波是否被放大
- 适用于线性差分方程
- CFD 中最常用稳定性分析工具
2.3 误差与稳定性分析 ❷ von Neumann 稳定性分析(Fourier模态分析)
von Neumann 稳定性分析方法
👉 方法梳理:
- 误差满足同一差分方程
- 用 Fourier 分解误差
- 研究单一波数传播
- 得到放大因子 \(G\)
- 判断 \(G\le1\)
2.3 误差与稳定性分析 ❷ von Neumann 稳定性分析(Fourier模态分析)
📘 作业二:采用von Neumann方法分析Crank–Nicolson格式的稳定性
一维热传导方程
\[\frac{\partial T}{\partial t} = \alpha \frac{\partial^2 T}{\partial x^2}\]
Crank–Nicolson格式
\[ \frac{T_i^{n+1} - T_i^n}{\Delta t}=\alpha \frac{1}{2}\left[\frac{T_{i+1}^{n} - 2T_i^{n} + T_{i-1}^{n}}{(\Delta x)^2}+\frac{T_{i+1}^{n+1} - 2T_i^{n+1} + T_{i-1}^{n+1}}{(\Delta x)^2}\right] \]
提交时间:5月9日(课代表收齐后统一提交)
2.3 误差与稳定性分析 ❸ 示例:线性对流方程
FTCS格式
\[ \frac{\partial u}{\partial t} + c \frac{\partial u}{\partial x} = 0 \]
我们采用时间前向差分、空间中心差分 👉 FTCS (Forward Time, Central Space)格式
\[ \frac{u_i^{n+1} - u_i^n}{\Delta t}=- c \frac{u_{i+1}^n - u_{i-1}^n}{2\Delta x} \]
对该格式进行 von Neumann 稳定性分析
设误差:
\[ \epsilon = e^{a t} e^{ikx} \]
2.3 误差与稳定性分析 ❸ 示例:线性对流方程
FTCS格式
引入 Fourier 误差模态
\[ \epsilon_i^n = e^{a t_n} e^{ikx_i} \]
其中: \(x_i = i\Delta x\), \(k\) 表示 \(x\) 方向波数
时间推进项
\[ \epsilon_i^{n+1} = e^{a t_{n+1}} e^{ikx_i} \]
空间项
\[ \epsilon_{i+1}^n = e^{a t_n} e^{ik(x_i+\Delta x)} = \epsilon_i^n e^{ik\Delta x} \]
\[ \epsilon_{i-1}^n = \epsilon_i^n e^{-ik\Delta x} \]
2.3 误差与稳定性分析 ❸ 示例:线性对流方程
FTCS格式
\[ \frac{\epsilon_i^{n+1} - \epsilon_i^n}{\Delta t}=- c \frac{\epsilon_{i+1}^n - \epsilon_{i-1}^n}{2\Delta x} \]
左边:
\[ \frac{\epsilon_i^{n+1} - \epsilon_i^n}{\Delta t} =\frac{\epsilon_i^n}{\Delta t}\left(e^{a\Delta t} - 1\right) \]
右边:
\[ -c \frac{\epsilon_i^n(e^{ik\Delta x} - e^{-ik\Delta x})}{2\Delta x} \]
约去公共因子 \(\epsilon_i^n\)
\[ e^{a\Delta t} =1- \frac{c\Delta t}{2\Delta x}\left(e^{ik\Delta x} - e^{-ik\Delta x}\right) \]
2.3 误差与稳定性分析 ❸ 示例:线性对流方程
FTCS格式
放大因子
\[ G = \left|e^{a\Delta t}\right| = \left|1- \frac{c\Delta t}{2\Delta x}\left(e^{ik\Delta x} - e^{-ik\Delta x}\right)\right| \]
利用指数恒等式
\[ e^{ik\Delta x} - e^{-ik\Delta x} = 2i\sin(k\Delta x) \]
得到:
\[ |G|^2 = 1 + \left(\frac{c\Delta t}{\Delta x}\right)^2 \sin^2(k\Delta x)>1 (无条件不稳定) \]
👉 FTCS(前向时间 + 中心空间)格式对对流方程是无条件不稳定的
2.3 误差与稳定性分析 ❹ 示例:线性对流方程
FTBS格式
\[ \frac{\partial u}{\partial t} + c \frac{\partial u}{\partial x} = 0 \]
当 \(c>0\) 时,采用 一阶迎风格式(Upwind) 👉 FTBS(Forward Time, Backward Space)
\[ \frac{u_i^{n+1} - u_i^n}{\Delta t} = -c \frac{u_i^n - u_{i-1}^n}{\Delta x} \]
对该格式进行 von Neumann 稳定性分析
设误差:
\[ \epsilon = e^{a t} e^{ikx} \]
2.3 误差与稳定性分析 ❹ 示例:线性对流方程
FTBS格式
引入 Fourier 误差模态
\[ \epsilon_i^n = e^{a t_n} e^{ikx_i} \]
其中: \(x_i = i\Delta x\)
时间推进项:
\[ \epsilon_i^{n+1} = \epsilon_i^n e^{a\Delta t} \]
空间项:
\[ \epsilon_{i-1}^n = \epsilon_i^n e^{-ik\Delta x} \]
2.3 误差与稳定性分析 ❹ 示例:线性对流方程
FTBS格式
代入差分格式:
\[ \frac{\epsilon_i^{n+1} - \epsilon_i^n}{\Delta t} = -c \frac{\epsilon_i^n - \epsilon_{i-1}^n}{\Delta x} \]
代入Fourier分解:
\[ \frac{\epsilon_i^n}{\Delta t}(e^{a\Delta t} - 1)=-c \frac{\epsilon_i^n(1 - e^{-ik\Delta x})}{\Delta x} \]
约去 \(\epsilon_i^n\):
\[ e^{a\Delta t} = 1 - \frac{c\Delta t}{\Delta x}(1 - e^{-ik\Delta x}) \]
2.3 误差与稳定性分析 ❹ 示例:线性对流方程
FTBS格式
定义 CFL 数:
\[ \nu = \frac{c\Delta t}{\Delta x} \]
放大因子:
\[ G = 1 - \nu(1 - e^{-ik\Delta x}) \]
展开指数:
\[ e^{-ik\Delta x} = \cos(k\Delta x) - i\sin(k\Delta x) \]
得到:
\[ G = 1 - \nu(1 - \cos\theta) - i\nu\sin\theta,\qquad \theta = k\Delta x \]
2.3 误差与稳定性分析 ❹ 示例:线性对流方程
FTBS格式
模平方:
\[ |G|^2 = [1 - \nu(1-\cos\theta)]^2 + \nu^2 \sin^2\theta \]
整理:
\[ |G|^2 = 1 - 2\nu(1-\cos\theta) + \nu^2[(1-\cos\theta)^2 + \sin^2\theta] \]
利用恒等式:
\[ (1-\cos\theta)^2 + \sin^2\theta = 2(1-\cos\theta) \]
得到:
\[ |G|^2 = 1 - 2\nu(1-\nu)(1-\cos\theta) \]
2.3 误差与稳定性分析 ❹ 示例:线性对流方程
FTBS格式
由于:
\[ 1-\cos\theta \ge 0 \]
要使
\[ |G| \le 1 \]
必须满足
\[ 0 \le \nu \le 1 \]
👉 结论:
- 当 \(0 \le \nu \le 1\) 时,FTBS格式稳定
- 当 \(\nu > 1\) 时,FTBS格式不稳定
💻 代码演示
vonNeumann_upwind.m
2.3 误差与稳定性分析 ❺ 示例:线性对流方程
Lax 格式
仍考虑线性对流方程:
\[ \frac{\partial u}{\partial t} + c \frac{\partial u}{\partial x} = 0 \]
Lax 格式将FTCS时间推进中的 \(u_i^n\) 用相邻点平均替代:
\[ u_i^{n+1} = \frac{1}{2}(u_{i+1}^n + u_{i-1}^n) - \frac{c\Delta t}{2\Delta x}(u_{i+1}^n - u_{i-1}^n) \]
也可写成
\[ u_i^{n+1} = \frac{1}{2}(u_{i+1}^n + u_{i-1}^n) - \frac{\nu}{2}(u_{i+1}^n - u_{i-1}^n) \]
其中
\[ \nu = \frac{c\Delta t}{\Delta x} \]
2.3 误差与稳定性分析 ❺ 示例:线性对流方程
Lax 格式
设 Fourier 误差模态为
\[ \epsilon_i^n = e^{a t_n} e^{ikx_i} \]
则:
\[ \epsilon_{i+1}^n = \epsilon_i^n e^{ik\Delta x},\qquad \epsilon_{i-1}^n = \epsilon_i^n e^{-ik\Delta x} \]
以及
\[ \epsilon_i^{n+1} = \epsilon_i^n e^{a\Delta t} \]
代入 Lax 格式:
\[ \epsilon_i^{n+1} = \frac{1}{2}(\epsilon_{i+1}^n + \epsilon_{i-1}^n) - \frac{\nu}{2}(\epsilon_{i+1}^n - \epsilon_{i-1}^n) \]
2.3 误差与稳定性分析 ❺ 示例:线性对流方程
Lax 格式
约去公共因子 \(\epsilon_i^n\):
\[ e^{a\Delta t} = \frac{1}{2}(e^{ik\Delta x} + e^{-ik\Delta x}) - \frac{\nu}{2}(e^{ik\Delta x} - e^{-ik\Delta x}) \]
利用恒等式:
\[ \frac{1}{2}(e^{i\theta}+e^{-i\theta}) = \cos\theta \]
\[ \frac{1}{2}(e^{i\theta}-e^{-i\theta}) = i\sin\theta \]
得到放大因子:
\[ G = \cos\theta - i\nu\sin\theta, \qquad \theta = k\Delta x \]
2.3 误差与稳定性分析 ❺ 示例:线性对流方程
Lax 格式
模平方:
\[ |G|^2 = \cos^2\theta + \nu^2\sin^2\theta \]
要使格式稳定,需满足
\[ |G|^2 \le 1 \]
即
\[ \cos^2\theta + \nu^2\sin^2\theta \le 1 \]
整理可得:
\[ \nu^2 \le 1 \]
2.3 误差与稳定性分析 ❺ 示例:线性对流方程
Lax 格式
👉 结论:
Lax 格式的稳定条件为
\[ |\nu| \le 1 \]
即:
\[ \left|\frac{c\Delta t}{\Delta x}\right| \le 1 \]
👉 物理理解:
- Lax 格式通过“邻点平均”引入了人工耗散
- 因而比 FTCS 稳定得多(但会使解出现明显平滑)
💻 代码演示
vonNeumann_lax.m
2.3 误差与稳定性分析 ❻ 示例:线性对流方程
BTCS 格式(Backward Time, Central Space)
同样考虑线性对流方程:
\[ \frac{\partial u}{\partial t} + c \frac{\partial u}{\partial x} = 0 \]
采用 BTCS 格式 👉(后向时间 + 中心空间)
\[ \frac{u_i^{n+1} - u_i^n}{\Delta t} = -c \frac{u_{i+1}^{n+1} - u_{i-1}^{n+1}}{2\Delta x} \]
设误差模态:
\[ \epsilon_i^n = e^{a t_n} e^{ikx_i} \]
则:
\[ \epsilon_i^{n+1} = \epsilon_i^n e^{a\Delta t}, \qquad \epsilon_{i\pm1}^{n+1}= \epsilon_i^{n+1} e^{\pm ik\Delta x} \]
2.3 误差与稳定性分析 ❻ 示例:线性对流方程
BTCS 格式
代入格式:
\[ \frac{\epsilon_i^{n+1} - \epsilon_i^n}{\Delta t} = -c \frac{\epsilon_{i+1}^{n+1} - \epsilon_{i-1}^{n+1}}{2\Delta x} \]
得到
\[ \frac{\epsilon_i^n(e^{a\Delta t}-1)}{\Delta t}=-c \frac{\epsilon_i^{n+1}(e^{ik\Delta x}-e^{-ik\Delta x})}{2\Delta x} \]
约去 \(\epsilon_i^n\) 后有:
\[ e^{a\Delta t} - 1 = - \nu e^{a\Delta t}\frac{e^{ik\Delta x}-e^{-ik\Delta x}}{2} \]
2.3 误差与稳定性分析 ❻ 示例:线性对流方程
BTCS 格式
利用:
\[ e^{ik\Delta x}-e^{-ik\Delta x}=2i\sin(k\Delta x) \]
得到:
\[ e^{a\Delta t} = \frac{1}{1 + i\nu\sin(k\Delta x)} \]
因此放大因子为:
\[ G = \frac{1}{1 + i\nu\sin\theta}, \qquad \theta = k\Delta x, \qquad |G| = \frac{1}{\sqrt{1+\nu^2\sin^2\theta}} \le 1 \]
对任意 \(\nu\) 都成立
2.3 误差与稳定性分析 ❻ 示例:线性对流方程
BTCS 格式
👉 结论:
BTCS 对线性对流方程无条件稳定
👉 说明:
虽然稳定,但该格式对纯对流问题会引入较强数值耗散,甚至相位误差也较明显。
💻 代码演示
vonNeumann_BTCS.m
2.3 误差与稳定性分析 ❼ 示例:线性对流方程
格式稳定性对比
| 格式 | 差分形式 | 放大因子 \(G\) | 稳定性条件 |
|---|---|---|---|
| FTCS | 时间前向 + 空间中心 | \(1 - i\nu\sin\theta\) | 无条件不稳定 |
| FTBS (Upwind) | 时间前向 + 空间迎风 | \(1-\nu(1-e^{-i\theta})\) | \(0\le \nu \le 1\) |
| FTFS (Downwind) | 时间前向 + 空间顺风 | \(1-\nu(e^{i\theta}-1)\) | 无条件不稳定 |
| BTCS | 时间后向 + 空间中心 | \({1}/{1+i\nu\sin\theta}\) | 无条件稳定 |
| Lax | Lax 平均 + 空间中心 | \(\cos\theta - i\nu\sin\theta\) | \(0\le \nu \le 1\) |
其中:
\[ \theta = k\Delta x, \qquad \nu = c \Delta t /\Delta x \]
👉 对于双曲型对流问题,稳定往往需要以“耗散”为代价;
💻 代码演示
LinearTransportV2.m
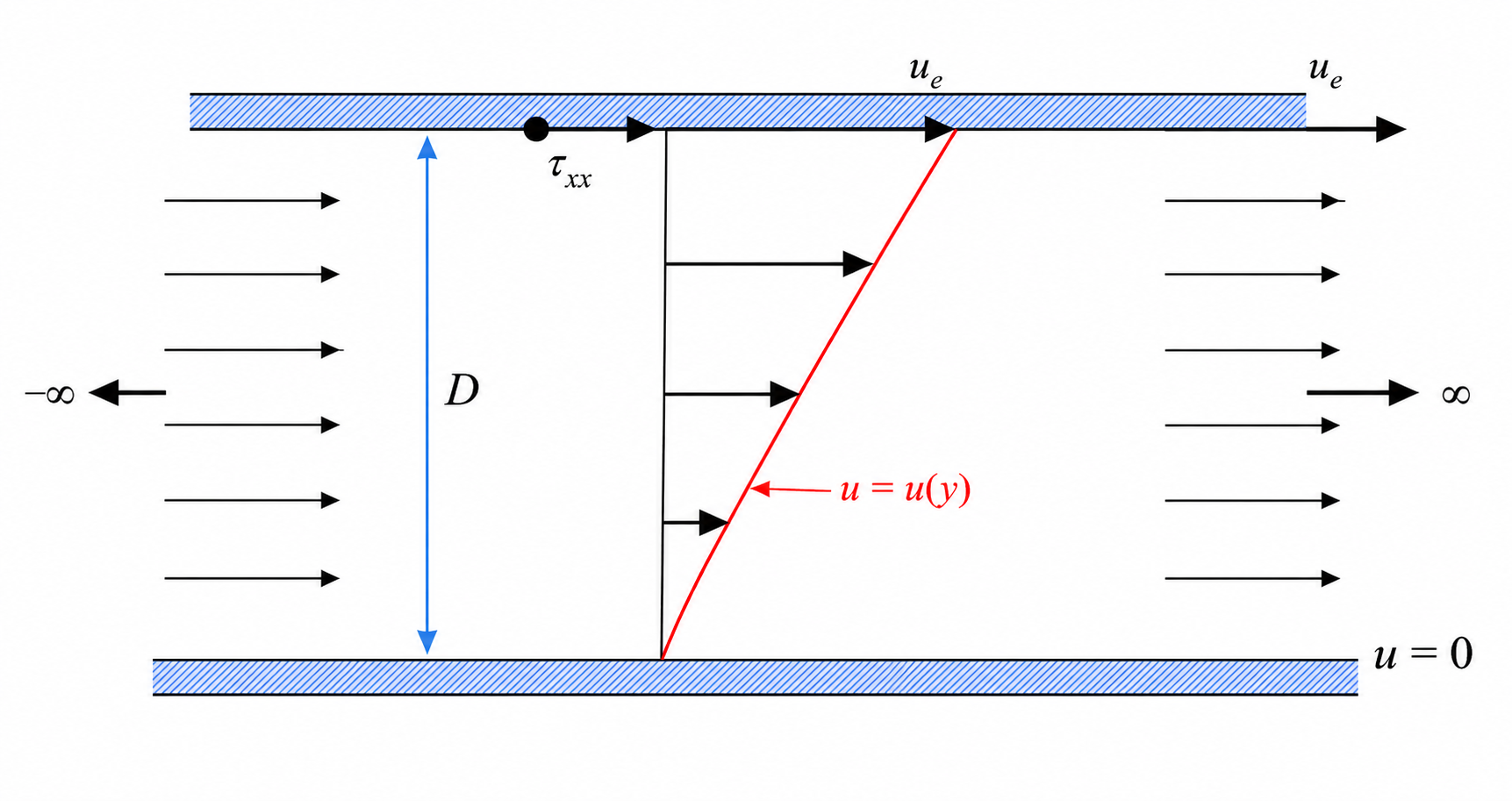
算例实践:Couette 流动
参考书
- John D. Anderson Computational Fluid Dynamics:
The Basics with Applications
McGraw-Hill, 1995 - Chapter 9
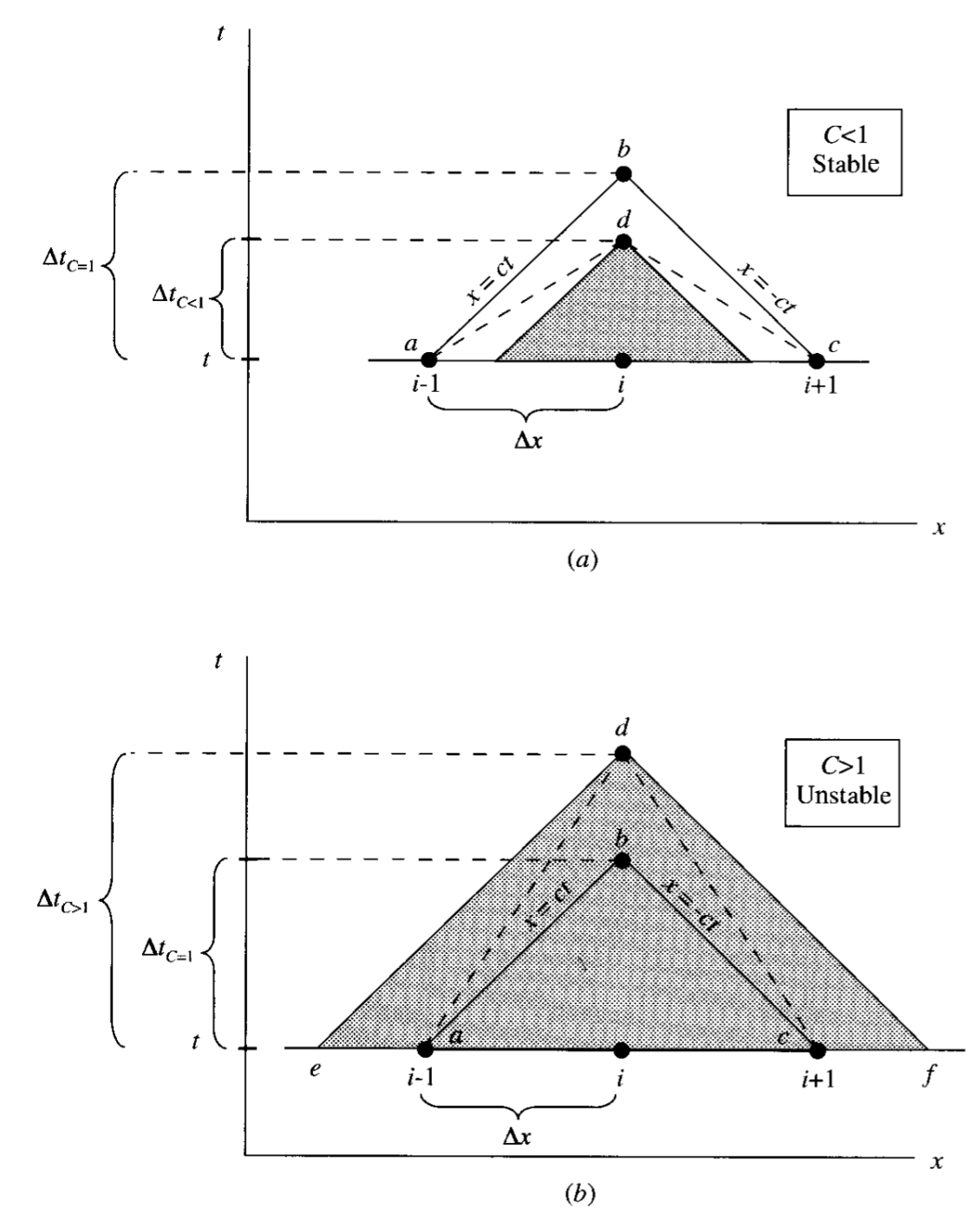
2.3 误差与稳定性分析 ❽ 示例:一维波动方程
\[ \frac{\partial^2 u}{\partial t^2} = c^2 \frac{\partial^2 u}{\partial x^2} \]
这里:
- \(c\) 为波速
- 方程具有两条特征线
\[ x - ct = \text{const}, \qquad x + ct = \text{const} \]
也即
\[ \frac{dx}{dt} = c, \qquad \frac{dx}{dt} = -c \]
2.3 误差与稳定性分析 ❽ 示例:一维波动方程
采用二阶中心差分离散:
- 时间二阶中心差分
- 空间二阶中心差分
\[ \frac{u_i^{n+1} - 2u_i^n + u_i^{n-1}}{\Delta t^2}=c^2 \frac{u_{i+1}^n - 2u_i^n + u_{i-1}^n}{\Delta x^2} \]
整理得
\[ u_i^{n+1}= 2u_i^n - u_i^{n-1}+ \left(\frac{c\Delta t}{\Delta x}\right)^2 \left( u_{i+1}^n - 2u_i^n + u_{i-1}^n \right) \]
定义 Courant 数
\[ C=\frac{c\Delta t}{\Delta x} \]
2.3 误差与稳定性分析 ❽ 示例:一维波动方程
对该格式进行 von Neumann 稳定性分析
设误差模态为
\[ \epsilon_i^n = G^n e^{ikx_i} \]
其中:\(G\) 为放大因子、\(k\) 为波数、\(x_i = i\Delta x\)
\[ \epsilon_i^{n+1} = G^{n+1} e^{ikx_i},\qquad \epsilon_i^{n-1} = G^{n-1} e^{ikx_i} \]
以及
\[ \epsilon_{i+1}^n = G^n e^{ik(x_i+\Delta x)} = \epsilon_i^n e^{ik\Delta x} \]
\[ \epsilon_{i-1}^n = G^n e^{ik(x_i-\Delta x)} = \epsilon_i^n e^{-ik\Delta x} \]
2.3 误差与稳定性分析 ❽ 示例:一维波动方程
将误差模态代入差分格式:
\[ \frac{\epsilon_i^{n+1} - 2\epsilon_i^n + \epsilon_i^{n-1}}{\Delta t^2}=c^2 \frac{\epsilon_{i+1}^n - 2\epsilon_i^n + \epsilon_{i-1}^n}{\Delta x^2} \]
代入各项后得到:
\[ \frac{G^{n+1}e^{ikx_i} - 2G^n e^{ikx_i} + G^{n-1}e^{ikx_i}}{\Delta t^2}=c^2 \frac{G^n e^{ikx_i}(e^{ik\Delta x}-2+e^{-ik\Delta x})}{\Delta x^2} \]
约去公共因子 \(G^{\,n-1}e^{ikx_i}\):
\[ \frac{G^2 - 2G + 1}{\Delta t^2}=c^2 \frac{G(e^{ik\Delta x}-2+e^{-ik\Delta x})}{\Delta x^2} \]
2.3 误差与稳定性分析 ❽ 示例:一维波动方程
利用恒等式
\[ e^{ik\Delta x}-2+e^{-ik\Delta x}=2\cos\theta -2=-4\sin^2\frac{\theta}{2}, \qquad \theta = k\Delta x \]
代回可得
\[ G^2 - 2G + 1=-4C^2 G \sin^2\frac{\theta}{2} \]
整理为关于 \(G\) 的二次方程:
\[ G^2 + \left(4C^2\sin^2\frac{\theta}{2}-2\right)G + 1 = 0 \]
2.3 误差与稳定性分析 ❽ 示例:一维波动方程
记
\[ \mu = 2C\sin\frac{\theta}{2} \]
则上式写成
\[ G^2 + (\mu^2 - 2)G + 1 = 0 \]
要使格式稳定,必须要求所有波数下误差不增长,即
\[ |G|\le 1 \]
对于这种二次方程,稳定要求根位于单位圆上或单位圆内。
2.3 误差与稳定性分析 ❽ 示例:一维波动方程
令
\[ G = e^{i\varphi} \Rightarrow G + \frac{1}{G} = 2\cos\varphi \]
将方程两边除以 \(G\):
\[ G + \frac{1}{G} + \mu^2 -2 = 0 \]
即
\[ 2\cos\varphi = 2 - \mu^2 \]
\[ -1 \le \cos\varphi \le 1 \Longrightarrow -2 \le 2-\mu^2 \le 2\Longrightarrow 0 \le \mu^2 \le 4 \]
2.3 误差与稳定性分析 ❽ 示例:一维波动方程
因此
\[ \mu^2 = 4C^2 \sin^2\frac{\theta}{2} \le 4 \]
即
\[ C^2 \sin^2\frac{\theta}{2} \le 1 \]
由于对任意波数都有
\[ \sin^2\frac{\theta}{2} \le 1 \]
为了使所有模态都稳定,必须满足最严格条件
\[ C^2 \le 1 \Longrightarrow \colorbox{yellow}{$\displaystyle \textcolor{black}{C = \frac{c\Delta t}{\Delta x} \le 1}$} \]
2.3 误差与稳定性分析 ❽ 示例:一维波动方程
👉 结论:
对于二阶中心差分离散的波动方程,
\[ \frac{\partial^2 u}{\partial t^2} = c^2 \frac{\partial^2 u}{\partial x^2} \]
其稳定条件(CFL 条件)为
\[ \colorbox{yellow}{$\displaystyle \textcolor{black}{C = \frac{c\Delta t}{\Delta x} \le 1}$} \]
2.3 误差与稳定性分析 ❽ 示例:一维波动方程
物理解释
波动方程有两条物理特征线:
\[ x - ct = \text{const}, \qquad x + ct = \text{const} \]
也可写为
\[ \frac{dx}{dt} = c,\qquad \frac{dx}{dt} = -c \]
在一个时间步 \(\Delta t\) 内,物理信息传播距离为
\[ c\Delta t \]
而数值格式在空间上只能通过相邻网格点传递信息,其作用范围约为
\[ \Delta x \]
因此必须要求:\(c\Delta t \le \Delta x\Longrightarrow C = \frac{c\Delta t}{\Delta x} \le 1\)
2.3 误差与稳定性分析 ❽ 示例:一维波动方程
物理解释
👉 当 \(C<1\) 时:
- 一个时间步内,物理信息传播距离不超过一个网格间距
- 数值依赖域能够覆盖物理依赖域
- 计算稳定、结果可信
👉 当 \(C>1\) 时:
- 一个时间步内跨越了数值格式可解析的范围
- 数值依赖域小于物理依赖域
- 误差会迅速放大,导致不稳定
💻 代码演示
Wave1Dv2.m
2.3 误差与稳定性分析 ❾
👉 本节核心思想:
- 误差不可避免
- 关键是控制误差传播
思考:如果我们拥有一台没有舍入误差的理想计算机,那么数值计算中就不会出现不稳定性?
实际上,数值稳定性的基本概念是建立在解本身随时间的演化行为之上的;它并不本质依赖于舍入误差的行为。将解本身表示为傅里叶级数:
\[ U(x) = \sum_m V_m e^{ik_m x} \]
其中,\(V_m\) 是第 \(m\) 个谐波的振幅。相应地,放大因子可写为:
\[ G = \frac{V_m^{n+1}}{V_m^n} \]
2.3 误差与稳定性分析 ❾
👉 检查:以下内容是否掌握:
- 误差的两种来源:数值误差 = 截断误差 + 舍入误差
- 误差传播 = 稳定性本质
- von Neumann 方法:Fourier 模态思想
- 放大因子 \(G\)
- CFL 条件的物理意义
2.4 网格与坐标变换 ❶ 基本思想
👉 如何构造“合适的网格”?
- 需要:
- 工程直觉(物理行为)
- 数学理解(函数性质)
- 一定想象力
- 网格直接影响:
- 数值精度
- 收敛性
- 物理边界刻画能力
2.4 网格与坐标变换 ❶ 基本思想
网格生成(Grid Generation)
两个本质问题
① 网格生成 👉 几何问题
② 方程求解 👉 数值问题
⚠️ 二者本质不同!
标准有限差分法要求:👉 均匀矩形网格
但现实问题:
- 复杂几何(如机翼)
- 非规则区域
👉 无法直接使用矩形网格
2.4 网格与坐标变换 ❶ 基本思想
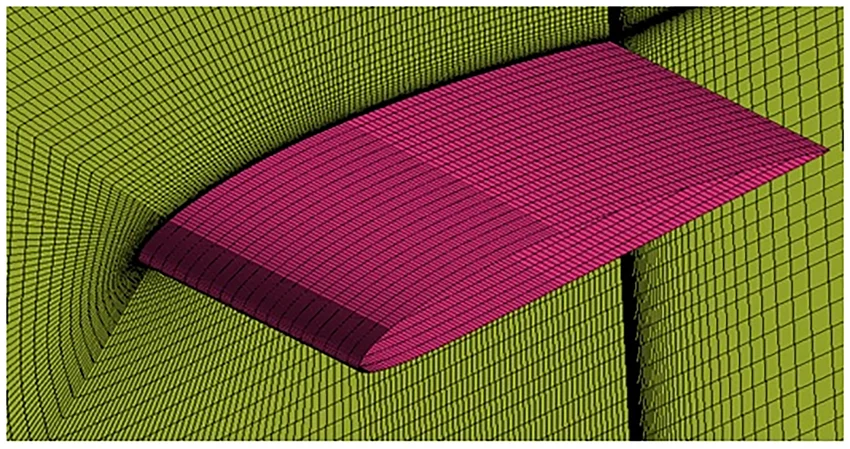
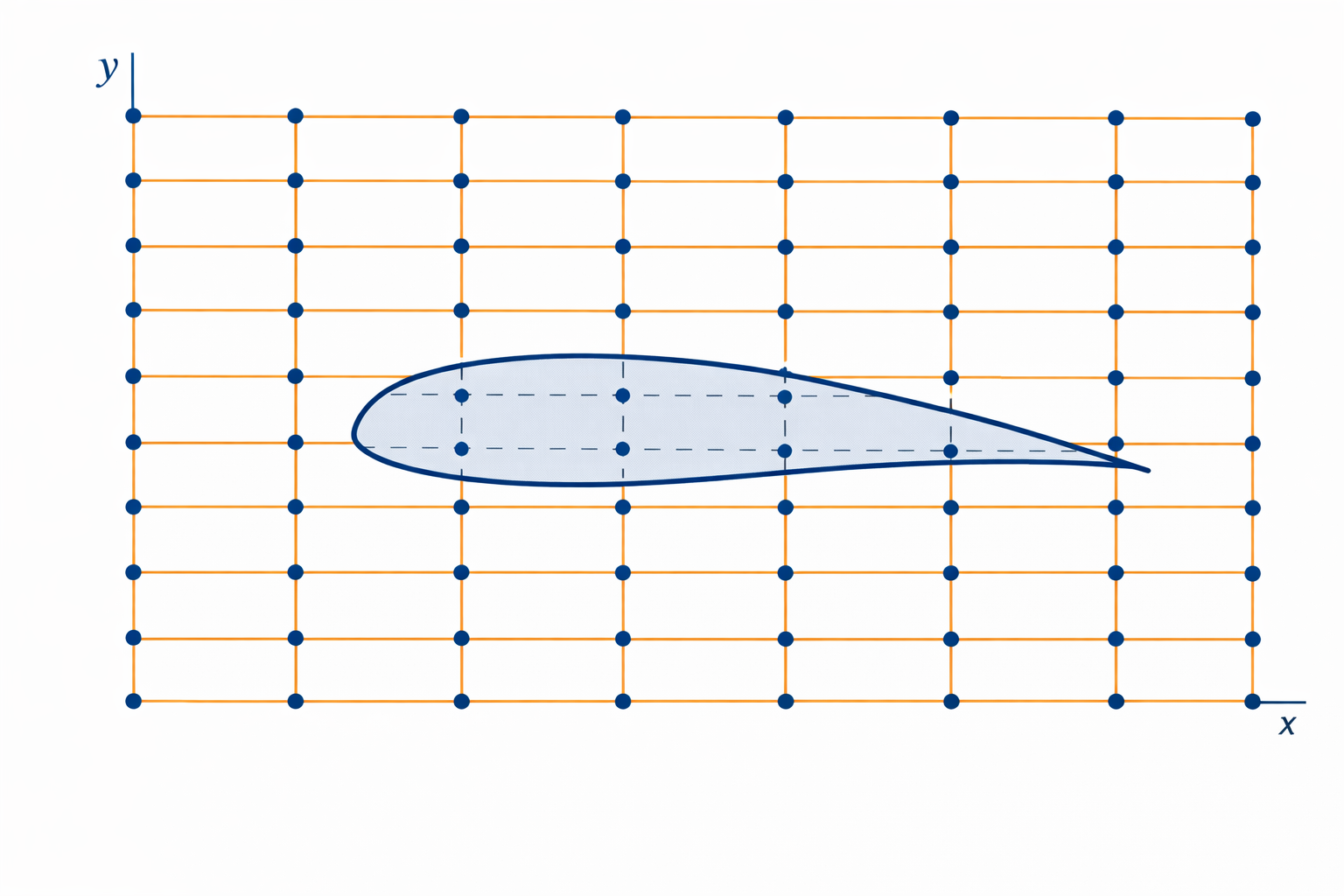
示例:机翼流动问题
- 使用矩形网格的问题:
- 网格点落在机翼内部 ❌
- 机翼表面缺乏网格点 ❌
- 无法正确施加边界条件
- 网格点落在机翼内部 ❌
思路:网格变换
👉 将物理空间中的非均匀网格 → 转换为计算空间中的规则网格
👉 使用 贴体网格(boundary-fitted grid)
- 网格线贴合物体边界
- 机翼表面成为一条坐标线
💻 代码演示
MeshTrans.m
2.4 网格与坐标变换 ❷ 坐标变换
曲线网格(物理空间)
- 非均匀
- 非矩形
- 难以直接差分计算
问题:如何进行数值离散?
👉 解决方法:坐标变换
\[ (x, y) \rightarrow (\xi, \eta) \]
在 \((\xi, \eta)\) 空间中:
- 网格变为:
- 规则、矩形、均匀
👉 可直接使用有限差分
2.4 网格与坐标变换 ❷ 坐标变换
关键要求:一一映射(One-to-one mapping)
- 物理空间 ↔︎ 计算空间
- 每个点唯一对应,例如:物理点 \(a,b,c\) 对应计算空间 \(a,b,c\)
数值求解流程
- 物理空间坐标变换 → 计算空间
- 控制方程从 \((x,y)\) 转换到 \((\xi,\eta)\),在计算空间求解 PDE
- 结果映射回物理空间
👉需要掌握
- 方程坐标变换形式
- 网格生成方法
- 理解CFD中的网格哲学
2.4 网格与坐标变换 ❷ 坐标变换
考虑二维非定常流:
\[ (x,y,t) \rightarrow (\xi,\eta,\tau) \]
定义:
\[ \begin{cases} \xi = \xi(x,y,t) \\ \eta = \eta(x,y,t) \\ \tau = \tau(t) \end{cases},~~~通常:\tau = t \]
链式法则
\[ \boxed{\frac{\partial}{\partial x}=\frac{\partial}{\partial \xi}\frac{\partial \xi}{\partial x}+\frac{\partial}{\partial \eta}\frac{\partial \eta}{\partial x}} ~~~~~~\boxed{ \frac{\partial}{\partial y}=\frac{\partial}{\partial \xi}\frac{\partial \xi}{\partial y}+\frac{\partial}{\partial \eta}\frac{\partial \eta}{\partial y}} ~~~~~~ \boxed{ \frac{\partial}{\partial t}=\frac{\partial}{\partial \xi}\frac{\partial \xi}{\partial t}+\frac{\partial}{\partial \eta}\frac{\partial \eta}{\partial t}+\frac{\partial}{\partial \tau} } \]
以下项称为度量系数(metrics)(反映了网格的几何特征):
\[ \frac{\partial \xi}{\partial x},\; \frac{\partial \eta}{\partial x},\; \frac{\partial \xi}{\partial y},\; \frac{\partial \eta}{\partial y} \]
2.4 网格与坐标变换 ❷ 坐标变换
链式法则(二阶导数)
\[ \frac{\partial}{\partial x}=\frac{\partial}{\partial \xi}\frac{\partial \xi}{\partial x}+\frac{\partial}{\partial \eta}\frac{\partial \eta}{\partial x} \]
\[ \frac{\partial^2}{\partial x^2}=\frac{\partial}{\partial x}\left[\frac{\partial}{\partial \xi}\frac{\partial \xi}{\partial x}+\frac{\partial}{\partial \eta}\frac{\partial \eta}{\partial x}\right] \]
使用乘积法则与链式法则:
\[ \boxed{\begin{aligned}\frac{\partial^2}{\partial x^2}=&\frac{\partial}{\partial \xi}\frac{\partial^2 \xi}{\partial x^2}+\frac{\partial}{\partial \eta}\frac{\partial^2 \eta}{\partial x^2}\\&+\frac{\partial^2}{\partial \xi^2}\left(\frac{\partial \xi}{\partial x}\right)^2+\frac{\partial^2}{\partial \eta^2}\left(\frac{\partial \eta}{\partial x}\right)^2\\&+2\frac{\partial^2}{\partial \xi \partial \eta}\frac{\partial \xi}{\partial x}\frac{\partial \eta}{\partial x}\end{aligned}}~~~~~~~~~\boxed{\begin{aligned}\frac{\partial^2}{\partial y^2}=&\frac{\partial}{\partial \xi}\frac{\partial^2 \xi}{\partial y^2}+\frac{\partial}{\partial \eta}\frac{\partial^2 \eta}{\partial y^2}\\&+\frac{\partial^2}{\partial \xi^2}\left(\frac{\partial \xi}{\partial y}\right)^2+\frac{\partial^2}{\partial \eta^2}\left(\frac{\partial \eta}{\partial y}\right)^2\\&+2\frac{\partial^2}{\partial \xi \partial \eta}\frac{\partial \xi}{\partial y}\frac{\partial \eta}{\partial y}\end{aligned}} \]
2.4 网格与坐标变换 ❷ 坐标变换
混合导数
\[ \boxed{\begin{aligned}\frac{\partial^2}{\partial x \partial y}=\frac{\partial}{\partial \xi}\frac{\partial^2 \xi}{\partial x \partial y}+\frac{\partial}{\partial \eta}\frac{\partial^2 \eta}{\partial x \partial y}+\frac{\partial^2}{\partial \xi^2}\frac{\partial \xi}{\partial x}\frac{\partial \xi}{\partial y}+\frac{\partial^2}{\partial \eta^2}\frac{\partial \eta}{\partial x}\frac{\partial \eta}{\partial y}+\frac{\partial^2}{\partial \xi \partial \eta}\left(\frac{\partial \xi}{\partial x}\frac{\partial \eta}{\partial y}+\frac{\partial \eta}{\partial x}\frac{\partial \xi}{\partial y}\right)\end{aligned}} \]
Laplace方程变换示例,原方程:
\[ \frac{\partial^2 \phi}{\partial x^2}+\frac{\partial^2 \phi}{\partial y^2}=0 \]
变换后形式
\[ \begin{aligned} \frac{\partial^2 \phi}{\partial \xi^2} \left[ \left(\frac{\partial \xi}{\partial x}\right)^2 + \left(\frac{\partial \xi}{\partial y}\right)^2 \right] + \frac{\partial^2 \phi}{\partial \eta^2} \left[ \left(\frac{\partial \eta}{\partial x}\right)^2 + \left(\frac{\partial \eta}{\partial y}\right)^2 \right] \\+ 2\frac{\partial^2 \phi}{\partial \xi \partial \eta} \left[ \frac{\partial \xi}{\partial x}\frac{\partial \eta}{\partial x} + \frac{\partial \xi}{\partial y}\frac{\partial \eta}{\partial y} \right] + \frac{\partial \phi}{\partial \xi} \left( \frac{\partial^2 \xi}{\partial x^2} + \frac{\partial^2 \xi}{\partial y^2} \right) + \frac{\partial \phi}{\partial \eta} \left( \frac{\partial^2 \eta}{\partial x^2} + \frac{\partial^2 \eta}{\partial y^2} \right) =0 \end{aligned} \]
2.4 网格与坐标变换 ❷ 坐标变换
评注
- 计算在规则网格进行
- 方程复杂性增加
- 几何复杂性转移到metrics
- 若使用守恒形式:可避免复杂二阶导变换
\[ \frac{\partial \mathbf{U}}{\partial t}+\frac{\partial \mathbf{F}}{\partial x}+\frac{\partial \mathbf{G}}{\partial y}+\frac{\partial \mathbf{H}}{\partial z}= \mathbf{RHS} \]
2.4 网格与坐标变换 ❷ 坐标变换
度量系数(Metrics)
\[ \frac{\partial \xi}{\partial x},\ \frac{\partial \xi}{\partial y},\ \frac{\partial \eta}{\partial x},\ \frac{\partial \eta}{\partial y} \]
如果变换\((x,y,t) \rightarrow (\xi,\eta,\tau)\)是解析给定的,则可以直接得到这些度量项的解析表达式。然而,在许多 CFD 应用中,该变换是数值给定的,因此度量项通常通过有限差分来计算。
在许多应用中,变换更方便写为其逆变换形式:
\[ x = x(\xi, \eta, \tau),~~y = y(\xi, \eta, \tau),~~ t = t(\tau) \]
\(\xi, \eta, \tau\) 是自变量。 要从逆变换得到度量系数,需要建立如下关系: \[ \frac{\partial \xi}{\partial x},\ \frac{\partial \eta}{\partial y} \quad \Longleftrightarrow \quad \frac{\partial x}{\partial \xi},\ \frac{\partial y}{\partial \eta} \]
2.4 网格与坐标变换 ❷ 坐标变换
2.4 网格与坐标变换 ❷ 坐标变换
考虑流动变量 \(u = u(x, y)\),\(x = x(\xi, \eta), \quad y = y(\xi, \eta)\)
对 \(\xi\) 求导:
\[\frac{\partial u}{\partial \xi} = \frac{\partial u}{\partial x} \frac{\partial x}{\partial \xi} + \frac{\partial u}{\partial y} \frac{\partial y}{\partial \xi}\]
对 \(\eta\) 求导:
\[\frac{\partial u}{\partial \eta} = \frac{\partial u}{\partial x} \frac{\partial x}{\partial \eta} + \frac{\partial u}{\partial y} \frac{\partial y}{\partial \eta}\]
看作关于未知量 \(\frac{\partial u}{\partial x}, \quad \frac{\partial u}{\partial y}\) 的线性方程组:
\[\begin{cases} \frac{\partial u}{\partial \xi} = \frac{\partial u}{\partial x} \frac{\partial x}{\partial \xi} + \frac{\partial u}{\partial y} \frac{\partial y}{\partial \xi} \\[6pt] \frac{\partial u}{\partial \eta} = \frac{\partial u}{\partial x} \frac{\partial x}{\partial \eta} + \frac{\partial u}{\partial y} \frac{\partial y}{\partial \eta} \end{cases}\]
2.4 网格与坐标变换 ❷ 坐标变换
用克拉默法则求解
\(\frac{\partial u}{\partial x} = \frac{ \begin{vmatrix} \frac{\partial u}{\partial \xi} & \frac{\partial y}{\partial \xi} \\ \frac{\partial u}{\partial \eta} & \frac{\partial y}{\partial \eta} \end{vmatrix} }{ \begin{vmatrix} \frac{\partial x}{\partial \xi} & \frac{\partial y}{\partial \xi} \\ \frac{\partial x}{\partial \eta} & \frac{\partial y}{\partial \eta} \end{vmatrix} }\)
分母定义为雅可比行列式(Jacobian):
\[ J = \frac{\partial(x,y)}{\partial(\xi,\eta)} = \begin{vmatrix} \frac{\partial x}{\partial \xi} & \frac{\partial y}{\partial \xi} \\ \frac{\partial x}{\partial \eta} & \frac{\partial y}{\partial \eta} \end{vmatrix} \]
展开得:
\(\frac{\partial u}{\partial x} = \frac{1}{J} \left[ \left(\frac{\partial u}{\partial \xi}\right)\left(\frac{\partial y}{\partial \eta}\right) - \left(\frac{\partial u}{\partial \eta}\right)\left(\frac{\partial y}{\partial \xi}\right) \right]\)
\(\frac{\partial u}{\partial y} = \frac{1}{J} \left[ \left(\frac{\partial u}{\partial \eta}\right)\left(\frac{\partial x}{\partial \xi}\right) - \left(\frac{\partial u}{\partial \xi}\right)\left(\frac{\partial x}{\partial \eta}\right) \right]\)
2.4 网格与坐标变换 ❷ 坐标变换
将上述表达推广为算子形式:
\[ \frac{\partial}{\partial x} = \frac{1}{J} \left[ \left(\frac{\partial}{\partial \xi}\right)\left(\frac{\partial y}{\partial \eta}\right) - \left(\frac{\partial}{\partial \eta}\right)\left(\frac{\partial y}{\partial \xi}\right) \right] \]
\[ \frac{\partial}{\partial y} = \frac{1}{J} \left[ \left(\frac{\partial}{\partial \eta}\right)\left(\frac{\partial x}{\partial \xi}\right) - \left(\frac{\partial}{\partial \xi}\right)\left(\frac{\partial x}{\partial \eta}\right) \right] \]
推导度量系数表达式
\[ \frac{\partial \xi}{\partial x} = \frac{1}{J}\frac{\partial y}{\partial \eta},~~~~~~~~~ \frac{\partial \eta}{\partial x} = -\frac{1}{J}\frac{\partial y}{\partial \xi} \]
\[ \frac{\partial \xi}{\partial y} = -\frac{1}{J}\frac{\partial x}{\partial \eta},~~~~~~~~~ \frac{\partial \eta}{\partial y} = \frac{1}{J}\frac{\partial x}{\partial \xi} \]
2.4 网格与坐标变换 ❷ 坐标变换
评注
- 直接度量(direct metrics)
\[\frac{\partial \xi}{\partial x}, \frac{\partial \eta}{\partial x}\]
- 逆度量(inverse metrics)
\[\frac{\partial x}{\partial \xi}, \frac{\partial y}{\partial \eta}\]
该推导是 CFD 中网格使用的核心基础。
两者通过 Jacobian \(J\) 联系:
\[ J = \frac{\partial(x,y)}{\partial(\xi,\eta)} = \begin{vmatrix} \frac{\partial x}{\partial \xi} & \frac{\partial x}{\partial \eta} \\ \frac{\partial y}{\partial \xi} & \frac{\partial y}{\partial \eta} \end{vmatrix} = \frac{\partial x}{\partial \xi}\frac{\partial y}{\partial \eta} - \frac{\partial x}{\partial \eta}\frac{\partial y}{\partial \xi} \]
2.4 网格与坐标变换 ❷ 坐标变换
CFD控制方程的变换形式
对于二维非定常流动且无源项的情况,守恒型方程可写为:
\[\frac{\partial U}{\partial t}+\frac{\partial F}{\partial x}+\frac{\partial G}{\partial y}=0\]
(此处仅考虑二维\(x,y\),是为了简化说明,推广到三维是直接的。)
我们希望得到如下形式:
\[\frac{\partial U_1}{\partial t}+\frac{\partial F_1}{\partial \xi}+\frac{\partial G_1}{\partial \eta}=0 \]
其中\(F_1,G_1\)是由原始通量\(F,G\)组合得到的新通量。
根据链式法则:
\[\frac{\partial U}{\partial t}+\frac{\partial F}{\partial \xi}\left(\frac{\partial \xi}{\partial x}\right)+\frac{\partial F}{\partial \eta}\left(\frac{\partial \eta}{\partial x}\right)+\frac{\partial G}{\partial \xi}\left(\frac{\partial \xi}{\partial y}\right)+\frac{\partial G}{\partial \eta}\left(\frac{\partial \eta}{\partial y}\right)=0 \]
2.4 网格与坐标变换 ❷ 坐标变换
两边乘以\(J\):
\[J\frac{\partial U}{\partial t}+J\left(\frac{\partial F}{\partial \xi}\right)\left(\frac{\partial \xi}{\partial x}\right)+J\left(\frac{\partial F}{\partial \eta}\right)\left(\frac{\partial \eta}{\partial x}\right)+J\left(\frac{\partial G}{\partial \xi}\right)\left(\frac{\partial \xi}{\partial y}\right)+J\left(\frac{\partial G}{\partial \eta}\right)\left(\frac{\partial \eta}{\partial y}\right)=0 \]
考虑如下项:
\[J\left(\frac{\partial F}{\partial \xi}\right)\left(\frac{\partial \xi}{\partial x}\right)=\frac{\partial}{\partial \xi}\left[J F \left(\frac{\partial \xi}{\partial x}\right)\right]-F\frac{\partial}{\partial \xi}\left(J\frac{\partial \xi}{\partial x}\right)\]
类似地:
\[ \begin{aligned} J\left(\frac{\partial F}{\partial \eta}\right)\left(\frac{\partial \eta}{\partial x}\right) &= \frac{\partial}{\partial \eta}\left[J F \left(\frac{\partial \eta}{\partial x}\right)\right]-F\frac{\partial}{\partial \eta}\left(J\frac{\partial \eta}{\partial x}\right) \\ J\left(\frac{\partial G}{\partial \xi}\right)\left(\frac{\partial \xi}{\partial y}\right) &= \frac{\partial}{\partial \xi}\left[J G \left(\frac{\partial \xi}{\partial y}\right)\right]-G\frac{\partial}{\partial \xi}\left(J\frac{\partial \xi}{\partial y}\right) \\ J\left(\frac{\partial G}{\partial \eta}\right)\left(\frac{\partial \eta}{\partial y}\right) &= \frac{\partial}{\partial \eta}\left[J G \left(\frac{\partial \eta}{\partial y}\right)\right]-G\frac{\partial}{\partial \eta}\left(J\frac{\partial \eta}{\partial y}\right) \end{aligned} \]
2.4 网格与坐标变换 ❷ 坐标变换
导入到守恒型方程,整理得到:
\[ \begin{aligned} J\frac{\partial U}{\partial t}+\frac{\partial}{\partial \xi}\left(JF\frac{\partial \xi}{\partial x}+JG\frac{\partial \xi}{\partial y}\right)+\frac{\partial}{\partial \eta}\left(JF\frac{\partial \eta}{\partial x}+JG\frac{\partial \eta}{\partial y}\right)\\-F\left[\frac{\partial}{\partial \xi}\left(J\frac{\partial \xi}{\partial x}\right)+\frac{\partial}{\partial \eta}\left(J\frac{\partial \eta}{\partial x}\right)\right]-G\left[\frac{\partial}{\partial \xi}\left(J\frac{\partial \xi}{\partial y}\right)+\frac{\partial}{\partial \eta}\left(J\frac{\partial \eta}{\partial y}\right)\right]&=0 \end{aligned} \]
注意恒等式
\[\frac{\partial}{\partial \xi}\left(J\frac{\partial \xi}{\partial x}\right)+\frac{\partial}{\partial \eta}\left(J\frac{\partial \eta}{\partial x}\right)=\frac{\partial}{\partial \xi}\left(\frac{\partial y}{\partial \eta}\right)-\frac{\partial}{\partial \eta}\left(\frac{\partial y}{\partial \xi}\right)=\frac{\partial^2 y}{\partial \xi \partial \eta}-\frac{\partial^2 y}{\partial \eta \partial \xi}=0\]
\[\frac{\partial}{\partial \xi}\left(J\frac{\partial \xi}{\partial y}\right)+\frac{\partial}{\partial \eta}\left(J\frac{\partial \eta}{\partial y}\right)=\frac{\partial}{\partial \xi}\left(-\frac{\partial x}{\partial \eta}\right)+\frac{\partial}{\partial \eta}\left(\frac{\partial x}{\partial \xi}\right)=-\frac{\partial^2 x}{\partial \xi \partial \eta}+\frac{\partial^2 x}{\partial \eta \partial \xi}=0\]
2.4 网格与坐标变换 ❷ 坐标变换
最终守恒形式化简为:
\[ \frac{\partial U_1}{\partial t}+\frac{\partial F_1}{\partial \xi}+\frac{\partial G_1}{\partial \eta}=0 \]
其中:
\[\begin{aligned} U_1 &= JU \\ F_1 &= JF\frac{\partial \xi}{\partial x}+JG\frac{\partial \xi}{\partial y} = F\frac{\partial y}{\partial \eta}-G\frac{\partial x}{\partial \eta}\\ G_1 &= \underbrace{JF\frac{\partial \eta}{\partial x}+JG\frac{\partial \eta}{\partial y}}_{\text{度量系数表示}} = \underbrace{-F\frac{\partial y}{\partial \xi}+G\frac{\partial x}{\partial \xi}}_{\text{逆度量系数表示}} \end{aligned}\]
2.4 网格与坐标变换 ❷ 坐标变换
小结
这一节的关键是:
✔ 将控制方程保持为强守恒形式
✔ 引入新的守恒变量:\(U_1=JU\)
✔ 构造新的通量:\(F_1,G_1\)
✔ 利用Jacobian实现几何映射
本质上:
坐标变换 ≠ 改变物理规律
而是改变“表达方式”以适应计算
2.4 网格与坐标变换 ❸ 网格变换实例
例:平板附近粘性流动的网格需求
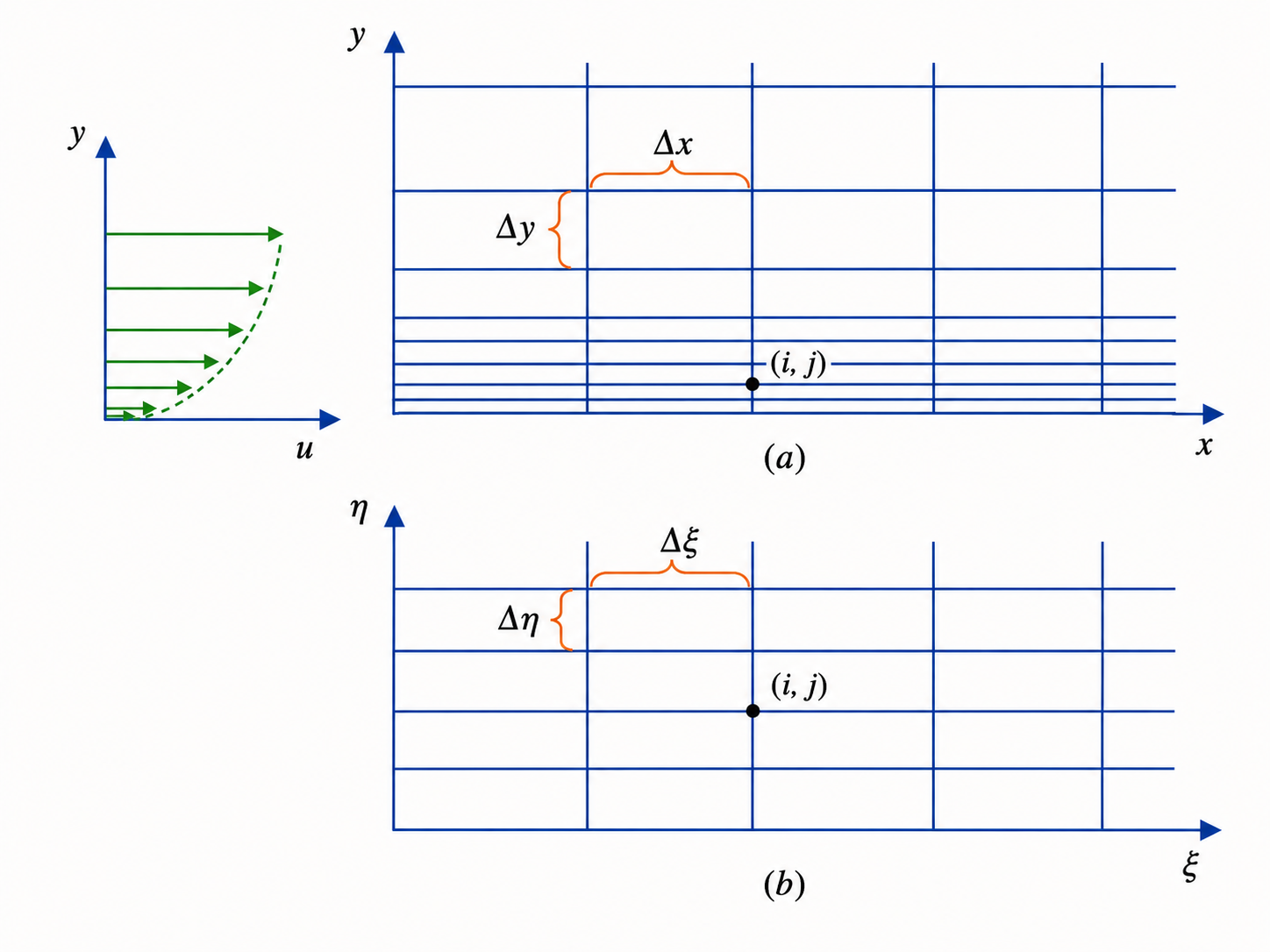
考虑图示的物理平面与计算平面。
设我们研究的是:
- 平直壁面上的粘性流动;
- 且如图左侧速度分布示意所示,靠近壁面处速度变化很快。
因此,为了精细计算近壁区域的流动细节:在物理平面中,应在 \(y\) 方向布置更密的网格。在离壁面较远处,流场变化较缓,网格则可以较粗。
另一方面,我们又希望在计算平面 \((\xi,\eta)\) 中处理的是:均匀网格
2.4 网格与坐标变换 ❸ 网格变换实例
例:平板附近粘性流动的网格需求
实现这种网格拉伸的一个简单解析变换为
\[ \xi = x,\quad \eta = \ln(y+1) \Longleftrightarrow x=\xi,\quad y=e^\eta-1 \]
可得
\[ \frac{dy}{d\eta}=e^\eta \]
- 当 \(\eta\) 变大时,即从平板向上远离壁面时,对于同一个固定的 \(\Delta\eta\),物理空间中的 \(\Delta y\) 会越来越大。
💻 代码演示
BL_grid.m
2.4 网格与坐标变换 ❸ 网格变换实例
例:控制方程在物理空间和计算空间中的形式
- 假定为定常流
- 仅以连续性方程为例说明
物理空间中
\[ \frac{\partial (\rho u)}{\partial x}+\frac{\partial (\rho v)}{\partial y}=0 \]
利用链式法则,得到
\[ \frac{\partial (\rho u)}{\partial \xi}\left(\frac{\partial \xi}{\partial x}\right)+\frac{\partial (\rho u)}{\partial \eta}\left(\frac{\partial \eta}{\partial x}\right)+\frac{\partial (\rho v)}{\partial \xi}\left(\frac{\partial \xi}{\partial y}\right)+\frac{\partial (\rho v)}{\partial \eta}\left(\frac{\partial \eta}{\partial y}\right)=0 \]
由直接变换式
\[ \xi=x,\qquad \eta=\ln(y+1) \Rightarrow \frac{\partial \xi}{\partial x}=1, \qquad \frac{\partial \xi}{\partial y}=0, \qquad \frac{\partial \eta}{\partial x}=0, \qquad \frac{\partial \eta}{\partial y}=\frac{1}{y+1} \]
2.4 网格与坐标变换 ❸ 网格变换实例
代入后得到的连续性方程
\[ \frac{\partial (\rho u)}{\partial \xi}+\frac{1}{y+1}\frac{\partial (\rho v)}{\partial \eta}=0 \]
又因为根据式 \(y+1=e^\eta\),计算空间的方程可写为
\[ e^\eta \frac{\partial (\rho u)}{\partial \xi}+\frac{\partial (\rho v)}{\partial \eta}=0 \]
此时应该能更清楚地看到:
- 网格变换并不是只改变点的位置;
- 它还会改变控制方程的数学形式;
- 这种改变正是通过度量系数体现出来的。
2.4 网格与坐标变换 ❸ 网格变换实例
从逆变换角度推导
\[ \frac{1}{J}\left[\frac{\partial (\rho u)}{\partial \xi}\left(\frac{\partial y}{\partial \eta}\right)-\frac{\partial (\rho u)}{\partial \eta}\left(\frac{\partial y}{\partial \xi}\right)\right]+\frac{1}{J}\left[\frac{\partial (\rho v)}{\partial \eta}\left(\frac{\partial x}{\partial \xi}\right)-\frac{\partial (\rho v)}{\partial \xi}\left(\frac{\partial x}{\partial \eta}\right)\right]=0 \]
其中 \(J\) 是雅可比。由逆变换 \(x=\xi,\qquad y=e^\eta-1\) 得到逆度量系数
\[ \frac{\partial x}{\partial \xi}=1, \qquad \frac{\partial x}{\partial \eta}=0, \qquad \frac{\partial y}{\partial \xi}=0, \qquad \frac{\partial y}{\partial \eta}=e^\eta \]
代入逆度量系数后的结果
\[ e^\eta \frac{\partial (\rho u)}{\partial \xi}+\frac{\partial (\rho v)}{\partial \eta}=0 \]
结果完全一致。
2.4 网格与坐标变换 ❸ 网格变换实例
评注
注意前面的推导过程:
- 连续性方程首先通过导数变换被改写;
- 在这一步,式仍然是一般形式;
- 只有当具体变换对应的度量系数代入之后,变换才真正变成“某一个具体网格”。
因此可以认识到:
控制方程变换中的具体信息,全部由度量系数来承载。
也就是说:
- 你不一定需要知道网格是怎样“画出来的”;
- 但你一定需要知道该网格对应的度量系数。
2.4 网格与坐标变换 ❸ 网格变换实例
评注
一个很形象的想象:假设你负责在某个物体外部进行数值计算,而另一个人负责网格生成。
那么:
- 你去向网格生成的人索取的,
- 其实就是这个坐标变换的度量系数(metrics)。
因为对于在计算平面中求解流动问题而言,
度量项已经包含了你所需的全部几何变换信息。
2.5 贴体坐标系:椭圆型方程用于网格生成 ❶
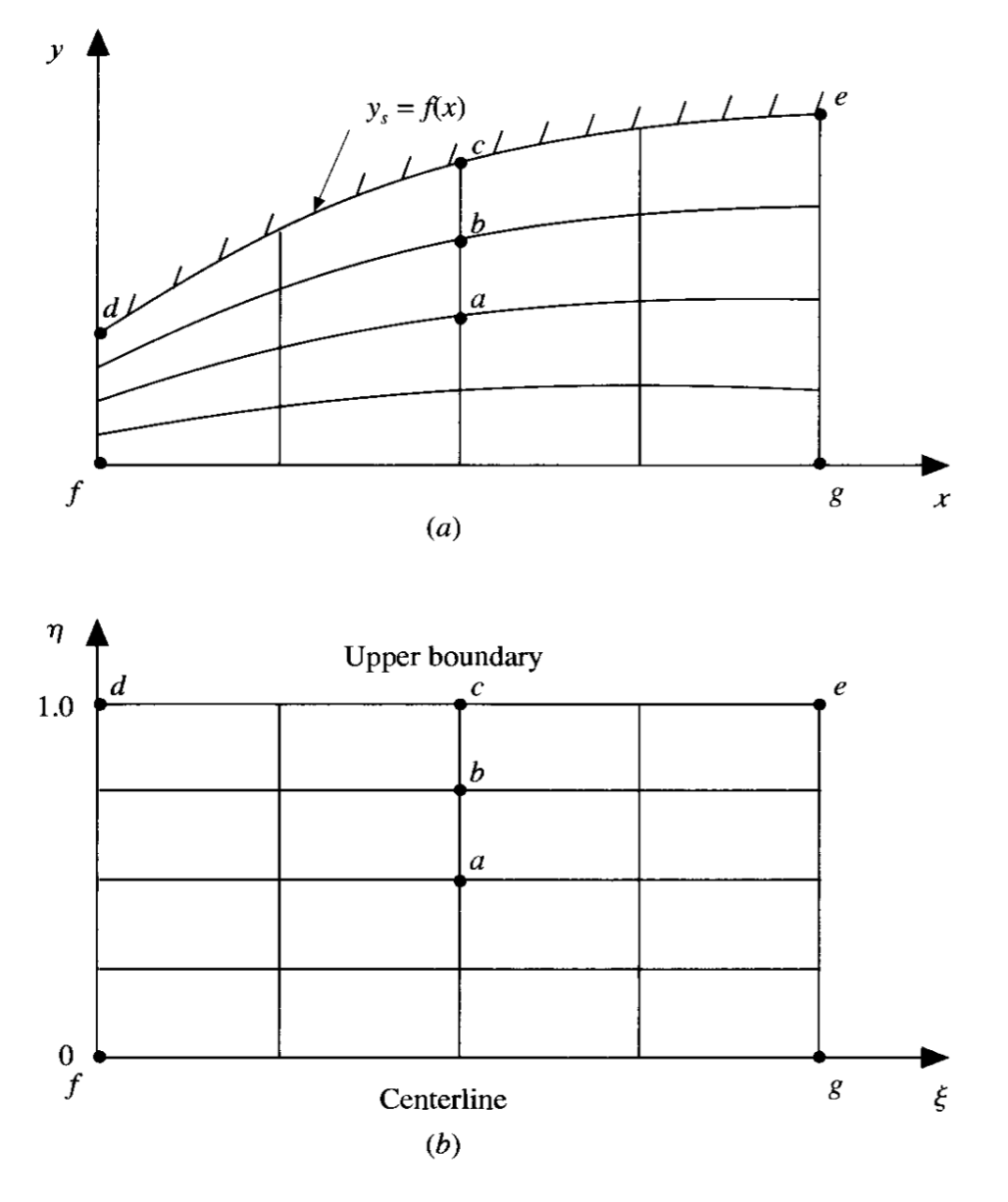
先看一个简单问题。考虑图示的扩张管道(divergent duct)内流动。
其中:
- 曲线 (de) 是管道上壁;
- 线段 (fg) 是中心线。
对于这个流动问题,在物理平面中采用简单矩形网格并不合适。
- 边界是曲线;
- 若仍用简单矩形网格,
- 网格线就无法准确贴合边界。
因此,需要构造曲线网格(curvilinear grid)。
2.5 贴体坐标系:椭圆型方程用于网格生成 ❶
绘制曲线网格,使得:
- 上壁 (de) 本身就是一条坐标线;
- 中心线 (fg) 也是一条坐标线。
这样,网格就能精确贴合边界。
一个简单的贴体变换:记图中上边界的纵坐标为
\[ y_s=f(x) \]
则如下变换可将其映射为 \((\xi,\eta)\) 空间中的矩形网格:
\[ \xi=x, \qquad \eta=\frac{y}{y_s},\qquad \text{其中 } y_s=f(x) \]
2.5 贴体坐标系:椭圆型方程用于网格生成 ❶
为什么这个变换是“贴体”的?
例如,在物理平面中考虑点 \(d\),其位置满足
\[ y=y_d=y_s(x_d) \]
将其代入网格变换式,得
\[ \eta_d=\frac{y_d}{y_s}=\frac{y_s(x_d)}{y_s(x_d)}=1 \]
因此,在计算平面中,点 \(d\) 位于
\[ \eta=\eta_d=1 \]
这说明:上边界上的这个点被映射到了计算平面中的一条水平直线 \(\eta=1\) 上。
2.5 贴体坐标系:椭圆型方程用于网格生成 ❶
为什么这个变换是“贴体”的?
再看物理平面中的点 \(c\),其纵坐标为
\[ y=y_c=y_s(x_c) \]
显然它在物理平面中的纵坐标与点 \(d\) 不同,也即
\[ y_c>y_d \]
但将 \(y_c\) 代入可得
\[ \eta_c=\frac{y_c}{y_s}=\frac{y_s(x_c)}{y_s(x_c)}=1 \]
所以,在计算平面中,点 \(c\) 也位于
\[ \eta=\eta_c=1 \]
2.5 贴体坐标系:椭圆型方程用于网格生成 ❶
由上面的讨论可知:
- 物理平面中曲线边界上的所有点,经过变换后,都落在计算平面中的同一条水平线 \(\eta=1\) 上。
这正是贴体坐标的核心思想:👉 复杂曲边界在计算平面中被映射成规则的坐标线。
2.5 贴体坐标系:椭圆型方程用于网格生成 ❷
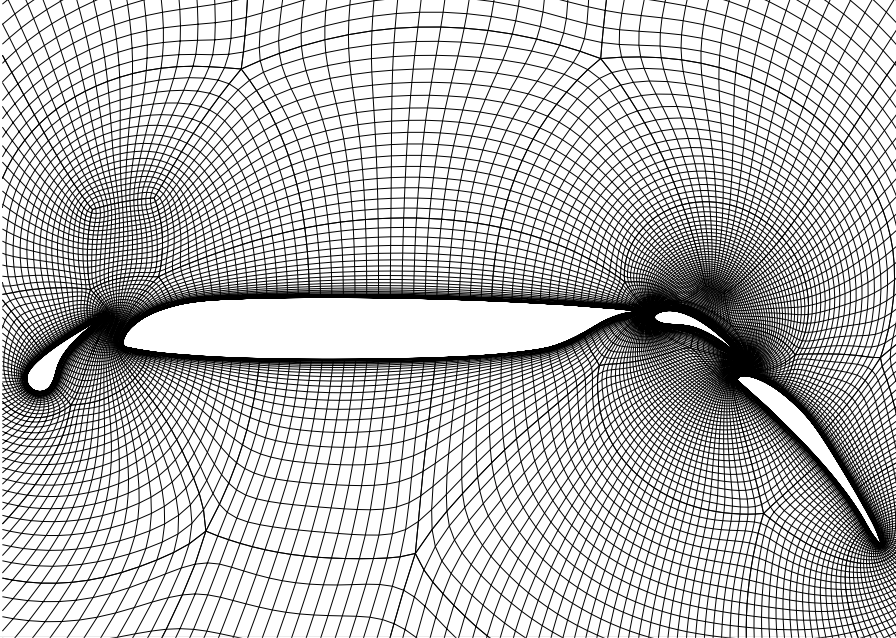
边界拟合坐标系与椭圆型网格生成
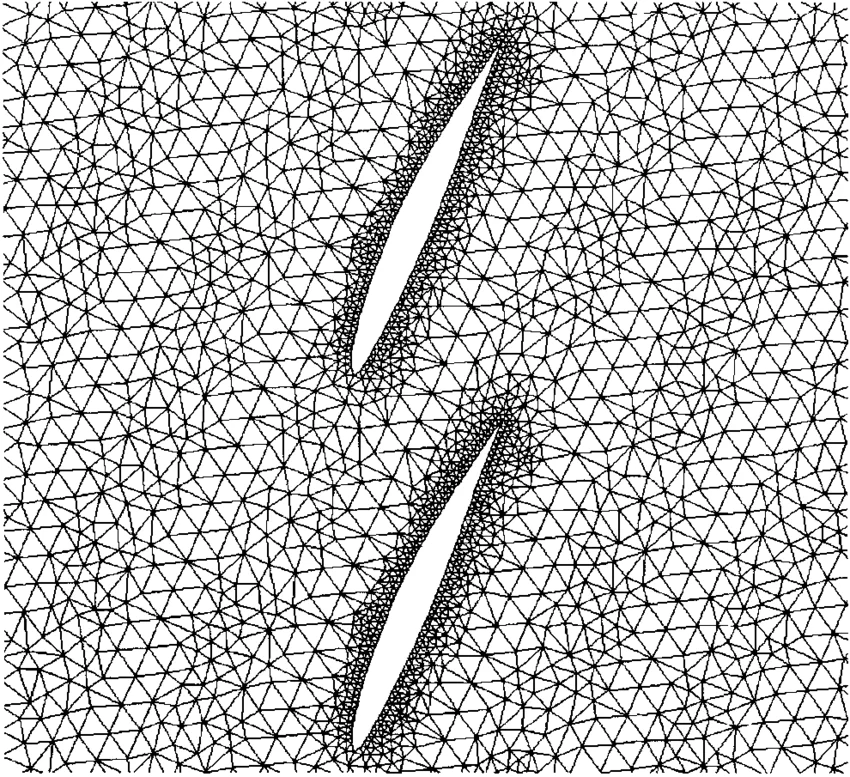
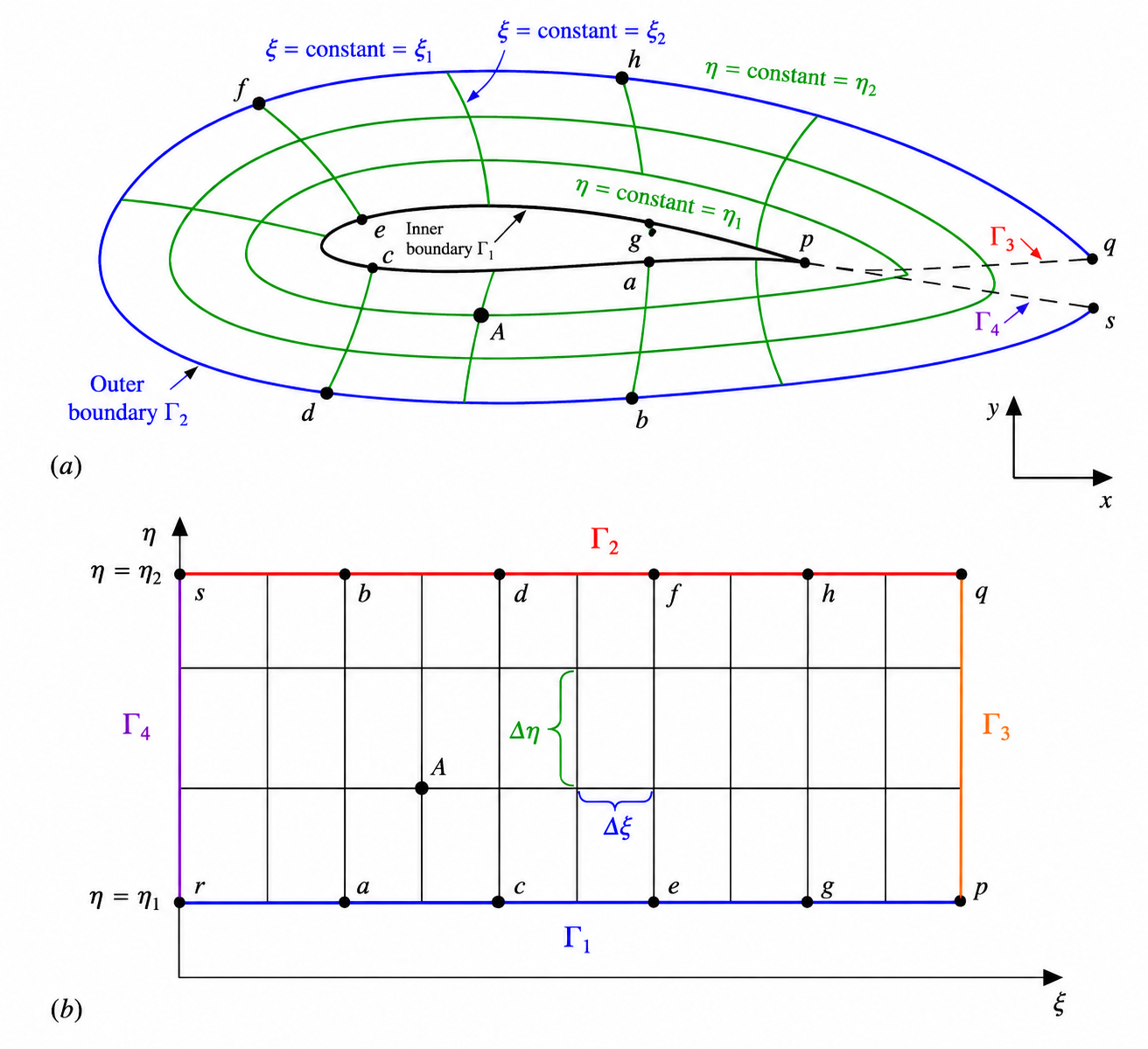
上述内容给出了一个简单的边界拟合坐标系示例。一个更复杂的例子如图所示。考虑图中翼型形状。在该翼型周围构造一个曲线坐标系,其中一条坐标线
\[
\eta = \eta_1 = \text{常数}
\]
位于翼型表面上。
2.5 贴体坐标系:椭圆型方程用于网格生成 ❷
- 该曲线是网格的内边界,记为 \(\Gamma_1\)
- 在物理平面与计算平面中均对应同一边界
外边界为: \[ \eta = \eta_2 = \text{常数} \]
记为 \(\Gamma_2\)
边界特点
- \(\Gamma_1\):由翼型几何决定(固定)
- \(\Gamma_2\):人为指定(可自由选择)
👉 因此:网格贴合边界 → 贴体坐标系(boundary-fitted coordinate system)
2.5 贴体坐标系:椭圆型方程用于网格生成 ❷
\(\xi\) 方向坐标线
从内边界向外发散的曲线满足:
\[ \xi = \text{常数} \]
例如:
- 曲线 \(ef\):\(\xi = 0.1\)
- 曲线 \(gh\):\(\xi = 0.2\)
👉 每条 \(\xi\) 曲线可以人为赋值
O型网格与C型网格
- 若 \(\eta=\text{常数}\) 完全包围翼型 → O型网格
- 若尾部打开(下游延伸) → C型网格
2.5 贴体坐标系:椭圆型方程用于网格生成 ❷
如何将物理平面中的曲线网格映射为计算平面中的均匀网格?
基本思路 将物理网格画在笛卡尔坐标 \((x,y)\) 上:
内边界:
\[ (x,y)\ \text{在}\ \Gamma_1\ \text{已知} \]
外边界:
\[ (x,y)\ \text{在}\ \Gamma_2\ \text{已知} \]
👉 这构成一个边值问题(boundary-value problem)
- 边界上所有点的 \((x,y)\) 都已知
- 需要求解内部点
2.5 贴体坐标系:椭圆型方程用于网格生成 ❷
保角变换与椭圆型网格生成
对于二维问题,保角变换(conformal mapping)提供了一种能够同时满足正交性和光滑性要求的网格生成方法。
我们把物理平面和计算平面中的网格点坐标分别表示为复数形式:
\[ Z=x+iy \]
\[ \zeta=\xi+i\eta \]
其中:
- \(Z=x+iy\) 表示物理平面;
- \(\zeta=\xi+i\eta\) 表示计算平面;
- \(i\) 为虚数单位。
2.5 贴体坐标系:椭圆型方程用于网格生成 ❷
保角变换与椭圆型网格生成
我们把物理平面和计算平面中的网格点坐标分别表示为复数形式:
\[ Z=x+iy \]
\[ \zeta=\xi+i\eta \]
如果
\[ \zeta=\zeta(Z) \]
是解析函数(函数不仅在某一点可导,而且在该点附近一小片区域内处处可导),则从 \((x,y)\) 到 \((\xi,\eta)\) 的变换称为保角变换。
保角变换的优良性质主要体现在:保角变换能够保持局部夹角不变。
2.5 贴体坐标系:椭圆型方程用于网格生成 ❷
保角变换与椭圆型网格生成
也就是说,如果在计算平面 \((\xi,\eta)\) 中两组网格线是正交的,那么经过保角变换后,在物理平面 \((x,y)\) 中对应的两组网格线仍然是正交的。
因此,保角变换具有两个重要特点:
- 网格线之间的夹角保持不变;
- 变换是光滑的;
- 若计算平面中网格正交,则物理平面中的网格也正交。
不过,保角变换主要适用于二维问题。对于一般复杂区域,构造合适的保角变换通常比较困难。
2.5 贴体坐标系:椭圆型方程用于网格生成 ❷
Cauchy–Riemann 条件
设
\[ \zeta=\xi+i\eta \]
是关于
\[ Z=x+iy \]
的解析函数,即
\[ \zeta=\zeta(Z). \]
则实部 \(\xi(x,y)\) 和虚部 \(\eta(x,y)\) 必须满足 Cauchy–Riemann 条件:
\[ \frac{\partial \xi}{\partial x}= \frac{\partial \eta}{\partial y}, \qquad \frac{\partial \xi}{\partial y}=-\frac{\partial \eta}{\partial x}. \]
2.5 贴体坐标系:椭圆型方程用于网格生成 ❷
Cauchy–Riemann 条件
\[ \frac{\partial \xi}{\partial x}= \frac{\partial \eta}{\partial y}, \qquad \frac{\partial \xi}{\partial y}=-\frac{\partial \eta}{\partial x}. \]
也可简写为:
\[ \xi_x=\eta_y, \qquad \xi_y=-\eta_x. \]
这两个关系是复变函数解析性的基本条件。
2.5 贴体坐标系:椭圆型方程用于网格生成 ❷
由 Cauchy–Riemann 条件:
\[ \xi_x=\eta_y, \qquad \xi_y=-\eta_x \]
对第一个式子关于 \(x\) 求导:
\[ \xi_{xx}=\eta_{yx} \]
对第二个式子关于 \(y\) 求导:
\[ \xi_{yy}=-\eta_{xy} \]
两式相加,得到:
\[ \xi_{xx}+\xi_{yy}= \eta_{yx}-\eta_{xy}=0 \]
同理,
\[ \eta_{xx}+\eta_{yy}=0. \]
2.5 贴体坐标系:椭圆型方程用于网格生成 ❷
因此,由 Cauchy–Riemann 条件可以推出:
\[ \frac{\partial^2 \xi}{\partial x^2}+ \frac{\partial^2 \xi}{\partial y^2}=0 \]
\[ \frac{\partial^2 \eta}{\partial x^2}+ \frac{\partial^2 \eta}{\partial y^2}=0 \]
也就是:
\[ \nabla^2 \xi=0, \qquad \nabla^2 \eta=0. \]
这说明:
如果 \(\zeta=\zeta(Z)\) 是解析函数,则 \(\xi\) 和 \(\eta\) 都是调和函数(指满足 Laplace 方程的函数)。
2.5 贴体坐标系:椭圆型方程用于网格生成 ❷
Laplace 方程是椭圆型方程,具有明显的平滑作用。
如果在边界上给定网格点的位置,那么求解 Laplace 方程可以把边界信息平滑地传递到区域内部。
其作用可以理解为:边界决定网格形状,Laplace 方程负责把这种形状平滑地扩散到内部。
因此,采用 Laplace 方程生成网格具有以下特点:
- 内部网格较光滑;
- 网格线不容易发生剧烈振荡;
- 适合处理封闭区域或复杂边界;
- 可以自然形成边界贴合网格。
2.5 贴体坐标系:椭圆型方程用于网格生成 ❷
与 CFD 网格生成的联系
在 CFD 中,网格生成的核心目标是:
- 边界要贴合物体;
- 近壁区域要足够密;
- 网格线要尽量光滑;
- 网格不能交叉;
- Jacobian 不能为零;
- 尽量减少非正交性和网格畸变。
保角变换可以很好地满足正交性和光滑性,但工程适用范围有限。
Laplace 方程虽然不能保证严格正交,但作为椭圆型方程,它具有天然的平滑作用,因此成为贴体网格生成的重要基础。
2.5 贴体坐标系:椭圆型方程用于网格生成 ❷
采用椭圆型偏微分方程定义坐标变换:
Laplace 方程
\[ \frac{\partial^2 \xi}{\partial x^2} + \frac{\partial^2 \xi}{\partial y^2} = 0 \]
\[ \frac{\partial^2 \eta}{\partial x^2} + \frac{\partial^2 \eta}{\partial y^2} = 0 \]
反变换(求 \(x,y\))\(x = x(\xi,\eta), \quad y = y(\xi,\eta)\)
得到:
\[ \alpha \frac{\partial^2 x}{\partial \xi^2}- 2\beta \frac{\partial^2 x}{\partial \xi \partial \eta}+ \gamma \frac{\partial^2 x}{\partial \eta^2} = 0 \]
\[ \alpha \frac{\partial^2 y}{\partial \xi^2}- 2\beta \frac{\partial^2 y}{\partial \xi \partial \eta}+ \gamma \frac{\partial^2 y}{\partial \eta^2} = 0 \]
2.5 贴体坐标系:椭圆型方程用于网格生成 ❷
系数定义
\[ \alpha = \left(\frac{\partial x}{\partial \eta}\right)^2 + \left(\frac{\partial y}{\partial \eta}\right)^2 \]
\[ \beta = \frac{\partial x}{\partial \xi}\frac{\partial x}{\partial \eta}+ \frac{\partial y}{\partial \xi}\frac{\partial y}{\partial \eta} \]
\[ \gamma = \left(\frac{\partial x}{\partial \xi}\right)^2 + \left(\frac{\partial y}{\partial \xi}\right)^2 \]
为了保证问题可解:👉 必须在整个边界上给定条件
包括:
- \(\Gamma_1\)(内边界)
- \(\Gamma_2\)(外边界)
- \(\Gamma_3, \Gamma_4\)(切割产生的侧边界)
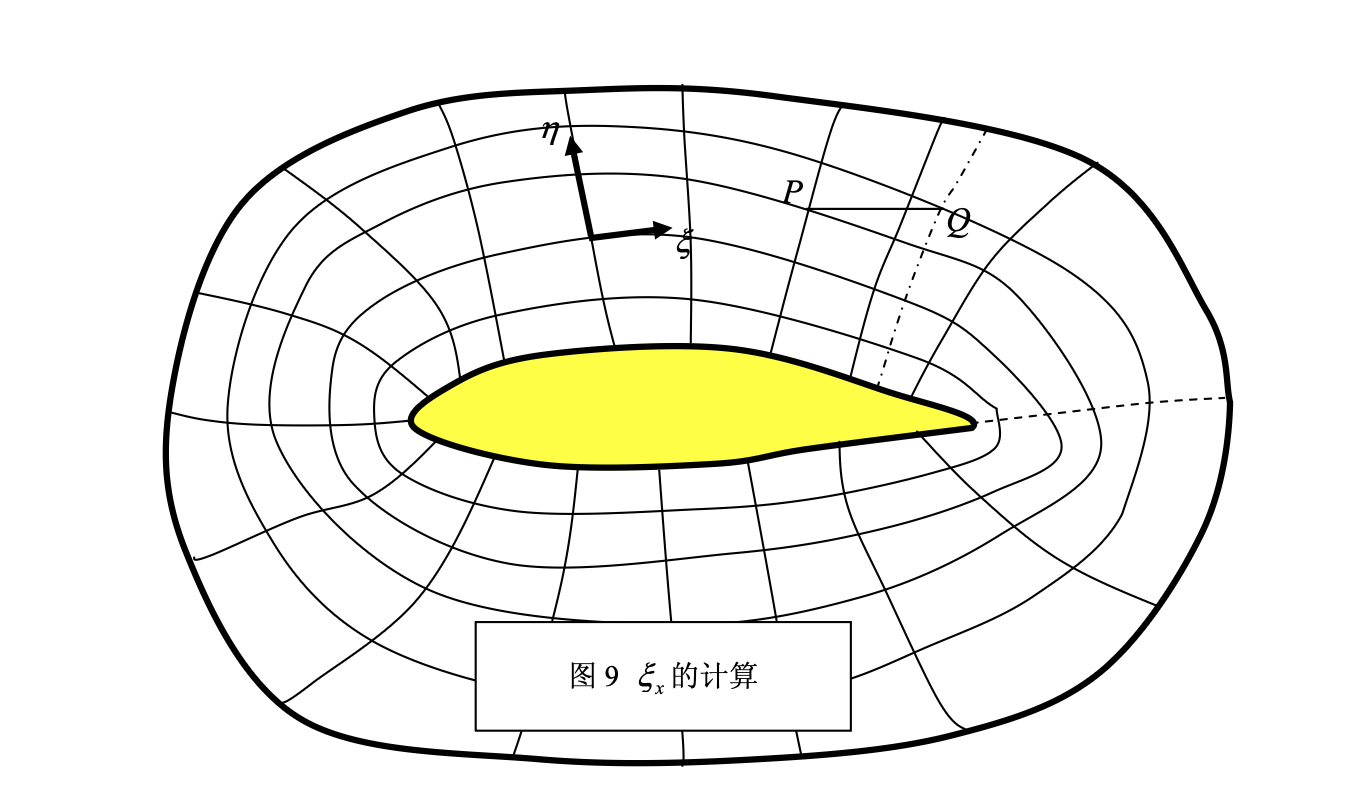
2.5 贴体坐标系:椭圆型方程用于网格生成 ❷
知识补充:二阶度量系数
前面已经得到一阶度量系数:
\[ \xi_x,\quad \xi_y,\quad \eta_x,\quad \eta_y \]
有:
\[ \begin{bmatrix} \xi_x & \xi_y\\ \eta_x & \eta_y \end{bmatrix}= \frac{1}{J} \begin{bmatrix} y_\eta & -x_\eta\\ -y_\xi & x_\xi \end{bmatrix} \]
其中 Jacobian 为:
\[ J= \frac{\partial(x,y)}{\partial(\xi,\eta)}= x_\xi y_\eta-x_\eta y_\xi \]
即:
\[ \boxed{ \xi_x=\frac{y_\eta}{J}, \qquad \xi_y=-\frac{x_\eta}{J}, \qquad \eta_x=-\frac{y_\xi}{J}, \qquad \eta_y=\frac{x_\xi}{J} } \]
2.5 贴体坐标系:椭圆型方程用于网格生成 ❷
知识补充:二阶度量系数
从恒等关系出发
\[ \frac{\partial \xi}{\partial \xi}=1 \]
根据链式法则:
\[ \xi_\xi=\xi_x x_\xi+\xi_y y_\xi=1 \]
同理,对 \(\eta\) 求导:
\[ \xi_\eta=\xi_x x_\eta+\xi_y y_\eta=0 \]
对 \(\xi\) 求导:
\[ \left( \xi_x x_\xi+\xi_y y_\xi \right)_\xi=0 \]
2.5 贴体坐标系:椭圆型方程用于网格生成 ❷
知识补充:二阶度量系数
对 \(\xi\) 求导:
\[ \left( \xi_x x_\xi+\xi_y y_\xi \right)_\xi=0 \]
使用乘积法则:
\[ (\xi_x)_\xi x_\xi+\xi_x x_{\xi\xi}+ (\xi_y)_\xi y_\xi+\xi_y y_{\xi\xi}=0 \]
其中:
\[ (\xi_x)_\xi= \xi_{xx}x_\xi+\xi_{xy}y_\xi \]
\[ (\xi_y)_\xi= \xi_{xy}x_\xi+\xi_{yy}y_\xi \]
代入得:
\[ (\xi_{xx}x_\xi+\xi_{xy}y_\xi)x_\xi+ (\xi_{xy}x_\xi+\xi_{yy}y_\xi)y_\xi+ \xi_x x_{\xi\xi}+ \xi_y y_{\xi\xi}=0 \]
2.5 贴体坐标系:椭圆型方程用于网格生成 ❷
知识补充:二阶度量系数
\[ (\xi_{xx}x_\xi+\xi_{xy}y_\xi)x_\xi+ (\xi_{xy}x_\xi+\xi_{yy}y_\xi)y_\xi+ \xi_x x_{\xi\xi}+ \xi_y y_{\xi\xi}=0 \]
整理为:
\[ \boxed{ \xi_{xx}(x_\xi)^2+ 2\xi_{xy}x_\xi y_\xi+ \xi_{yy}(y_\xi)^2+ \xi_x x_{\xi\xi}+ \xi_y y_{\xi\xi}=0 } \]
仍从
\[ \xi_x x_\xi+\xi_y y_\xi=1 \]
出发,对 \(\eta\) 求导:
\[ \left( \xi_x x_\xi+\xi_y y_\xi \right)_\eta=0 \]
展开:
\[ (\xi_x)_\eta x_\xi+\xi_x x_{\xi\eta} + (\xi_y)_\eta y_\xi+\xi_y y_{\xi\eta}=0 \]
2.5 贴体坐标系:椭圆型方程用于网格生成 ❷
知识补充:二阶度量系数
\[ (\xi_x)_\eta x_\xi+\xi_x x_{\xi\eta} + (\xi_y)_\eta y_\xi+\xi_y y_{\xi\eta}=0 \]
其中:
\[ (\xi_x)_\eta= \xi_{xx}x_\eta+\xi_{xy}y_\eta \]
\[ (\xi_y)_\eta= \xi_{xy}x_\eta+\xi_{yy}y_\eta \]
代入得:
\[ (\xi_{xx}x_\eta+\xi_{xy}y_\eta)x_\xi+ (\xi_{xy}x_\eta+\xi_{yy}y_\eta)y_\xi+ \xi_x x_{\xi\eta}+ \xi_y y_{\xi\eta}=0 \]
整理为:
\[ \boxed{ \xi_{xx}x_\xi x_\eta+ \xi_{xy}(x_\xi y_\eta+x_\eta y_\xi)+ \xi_{yy}y_\xi y_\eta+ \xi_x x_{\xi\eta}+ \xi_y y_{\xi\eta}=0 } \]
2.5 贴体坐标系:椭圆型方程用于网格生成 ❷
知识补充:二阶度量系数
对第二个恒等式关于 \(\eta\) 求导
\[ \xi_x x_\eta+\xi_y y_\eta=0 \]
\[ \left( \xi_x x_\eta+\xi_y y_\eta \right)_\eta=0 \]
展开:
\[ (\xi_x)_\eta x_\eta+\xi_x x_{\eta\eta}+ (\xi_y)_\eta y_\eta+\xi_y y_{\eta\eta}=0 \]
代入
\[ (\xi_x)_\eta= \xi_{xx}x_\eta+\xi_{xy}y_\eta \]
\[ (\xi_y)_\eta= \xi_{xy}x_\eta+\xi_{yy}y_\eta \]
得到:
\[ (\xi_{xx}x_\eta+\xi_{xy}y_\eta)x_\eta+ (\xi_{xy}x_\eta+\xi_{yy}y_\eta)y_\eta+ \xi_x x_{\eta\eta}+ \xi_y y_{\eta\eta}=0 \]
2.5 贴体坐标系:椭圆型方程用于网格生成 ❷
知识补充:二阶度量系数
\[ (\xi_{xx}x_\eta+\xi_{xy}y_\eta)x_\eta+ (\xi_{xy}x_\eta+\xi_{yy}y_\eta)y_\eta+ \xi_x x_{\eta\eta}+ \xi_y y_{\eta\eta}=0 \]
整理为:
\[ \boxed{ \xi_{xx}(x_\eta)^2+ 2\xi_{xy}x_\eta y_\eta+ \xi_{yy}(y_\eta)^2+ \xi_x x_{\eta\eta}+ \xi_y y_{\eta\eta}=0 } \]
结合前面得到的
\[ \boxed{ \xi_{xx}x_\xi x_\eta+ \xi_{xy}(x_\xi y_\eta+x_\eta y_\xi)+ \xi_{yy}y_\xi y_\eta+ \xi_x x_{\xi\eta}+ \xi_y y_{\xi\eta}=0 } \]
\[ \boxed{ \xi_{xx}(x_\xi)^2+ 2\xi_{xy}x_\xi y_\xi+ \xi_{yy}(y_\xi)^2+ \xi_x x_{\xi\xi}+ \xi_y y_{\xi\xi}=0 } \]
2.5 贴体坐标系:椭圆型方程用于网格生成 ❷
知识补充:二阶度量系数
整理为矩阵形式:
\[ \begin{bmatrix} (x_\xi)^2 & 2x_\xi y_\xi & (y_\xi)^2 \\[4pt] x_\xi x_\eta & x_\xi y_\eta+x_\eta y_\xi & y_\xi y_\eta \\[4pt] (x_\eta)^2 & 2x_\eta y_\eta & (y_\eta)^2 \end{bmatrix} \begin{bmatrix} \xi_{xx}\\[4pt] \xi_{xy}\\[4pt] \xi_{yy} \end{bmatrix}=- \begin{bmatrix} \xi_x x_{\xi\xi}+\xi_y y_{\xi\xi}\\[4pt] \xi_x x_{\xi\eta}+\xi_y y_{\xi\eta}\\[4pt] \xi_x x_{\eta\eta}+\xi_y y_{\eta\eta} \end{bmatrix} \]
因此:
\[ \boxed{ \begin{bmatrix} \xi_{xx}\\[4pt] \xi_{xy}\\[4pt] \xi_{yy} \end{bmatrix}=- \begin{bmatrix} (x_\xi)^2 & 2x_\xi y_\xi & (y_\xi)^2 \\[4pt] x_\xi x_\eta & x_\xi y_\eta+x_\eta y_\xi & y_\xi y_\eta \\[4pt] (x_\eta)^2 & 2x_\eta y_\eta & (y_\eta)^2 \end{bmatrix}^{-1} \begin{bmatrix} \xi_x x_{\xi\xi}+\xi_y y_{\xi\xi}\\[4pt] \xi_x x_{\xi\eta}+\xi_y y_{\xi\eta}\\[4pt] \xi_x x_{\eta\eta}+\xi_y y_{\eta\eta} \end{bmatrix} } \]
这就给出了 \(\xi\) 的二阶度量系数。
2.5 贴体坐标系:椭圆型方程用于网格生成 ❷
知识补充:二阶度量系数
同理,
\[ \begin{bmatrix} (x_\xi)^2 & 2x_\xi y_\xi & (y_\xi)^2 \\[4pt] x_\xi x_\eta & x_\xi y_\eta+x_\eta y_\xi & y_\xi y_\eta \\[4pt] (x_\eta)^2 & 2x_\eta y_\eta & (y_\eta)^2 \end{bmatrix} \begin{bmatrix} \eta_{xx}\\[4pt] \eta_{xy}\\[4pt] \eta_{yy} \end{bmatrix}=- \begin{bmatrix} \eta_x x_{\xi\xi}+\eta_y y_{\xi\xi}\\[4pt] \eta_x x_{\xi\eta}+\eta_y y_{\xi\eta}\\[4pt] \eta_x x_{\eta\eta}+\eta_y y_{\eta\eta} \end{bmatrix} \]
因此:
\[ \boxed{ \begin{bmatrix} \eta_{xx}\\[4pt] \eta_{xy}\\[4pt] \eta_{yy} \end{bmatrix}=- \begin{bmatrix} (x_\xi)^2 & 2x_\xi y_\xi & (y_\xi)^2 \\[4pt] x_\xi x_\eta & x_\xi y_\eta+x_\eta y_\xi & y_\xi y_\eta \\[4pt] (x_\eta)^2 & 2x_\eta y_\eta & (y_\eta)^2 \end{bmatrix}^{-1} \begin{bmatrix} \eta_x x_{\xi\xi}+\eta_y y_{\xi\xi}\\[4pt] \eta_x x_{\xi\eta}+\eta_y y_{\xi\eta}\\[4pt] \eta_x x_{\eta\eta}+\eta_y y_{\eta\eta} \end{bmatrix} } \]
给出了 \(\eta\) 的二阶度量系数。
2.5 贴体坐标系:椭圆型方程用于网格生成 ❷
知识补充:二阶度量系数
求矩阵逆得到
\[ \begin{bmatrix} \xi_{xx}\\[4pt] \xi_{xy}\\[4pt] \xi_{yy} \end{bmatrix}= \frac{-1} { J\left[(x_\xi y_\eta)^2+(x_\eta y_\xi)^2\right] } \begin{bmatrix} J(y_\eta)^2 & -2J y_\xi y_\eta & J(y_\xi)^2 \\[4pt] -Jx_\eta y_\eta & J(x_\xi y_\eta+x_\eta y_\xi) & -Jx_\xi y_\xi \\[4pt] J(x_\eta)^2 & -2Jx_\xi x_\eta & J(x_\xi)^2 \end{bmatrix} \begin{bmatrix} \xi_x x_{\xi\xi}+\xi_y y_{\xi\xi}\\[4pt] \xi_x x_{\xi\eta}+\xi_y y_{\xi\eta}\\[4pt] \xi_x x_{\eta\eta}+\xi_y y_{\eta\eta} \end{bmatrix}. \]
\[ \begin{bmatrix} \eta_{xx}\\[4pt] \eta_{xy}\\[4pt] \eta_{yy} \end{bmatrix}= \frac{-1} { J\left[(x_\xi y_\eta)^2+(x_\eta y_\xi)^2\right] } \begin{bmatrix} J(y_\eta)^2 & -2J y_\xi y_\eta & J(y_\xi)^2 \\[4pt] -Jx_\eta y_\eta & J(x_\xi y_\eta+x_\eta y_\xi) & -Jx_\xi y_\xi \\[4pt] J(x_\eta)^2 & -2Jx_\xi x_\eta & J(x_\xi)^2 \end{bmatrix} \begin{bmatrix} \eta_x x_{\xi\xi}+\eta_y y_{\xi\xi}\\[4pt] \eta_x x_{\xi\eta}+\eta_y y_{\xi\eta}\\[4pt] \eta_x x_{\eta\eta}+\eta_y y_{\eta\eta} \end{bmatrix}. \]
2.5 贴体坐标系:椭圆型方程用于网格生成 ❷
回到椭圆型偏微分方程定义坐标变换:
\[ \frac{\partial^2 \xi}{\partial x^2} + \frac{\partial^2 \xi}{\partial y^2} = 0, \qquad \frac{\partial^2 \eta}{\partial x^2} + \frac{\partial^2 \eta}{\partial y^2} = 0 \]
代入二阶度量系数表达式,得到:
\[ \alpha \frac{\partial^2 x}{\partial \xi^2}- 2\beta \frac{\partial^2 x}{\partial \xi \partial \eta}+ \gamma \frac{\partial^2 x}{\partial \eta^2} = 0, \qquad \alpha \frac{\partial^2 y}{\partial \xi^2}- 2\beta \frac{\partial^2 y}{\partial \xi \partial \eta}+ \gamma \frac{\partial^2 y}{\partial \eta^2} = 0 \]
系数定义
\[ \alpha = \left(\frac{\partial x}{\partial \eta}\right)^2 + \left(\frac{\partial y}{\partial \eta}\right)^2,\qquad \beta = \frac{\partial x}{\partial \xi}\frac{\partial x}{\partial \eta}+ \frac{\partial y}{\partial \xi}\frac{\partial y}{\partial \eta},\qquad \gamma = \left(\frac{\partial x}{\partial \xi}\right)^2 + \left(\frac{\partial y}{\partial \xi}\right)^2 \]
💻 代码演示
EllipticGrid.m
2.5 贴体坐标系:椭圆型方程用于网格生成 ❷
C型网格切割
通过在尾缘切开:
- 引入两条新边界:\(\Gamma_3\), \(\Gamma_4\)
- 物理上重合,计算上分离
👉 形成矩形计算域
- 计算平面:规则矩形网格(均匀)
- 物理平面:非均匀曲线网格
对应关系:
\[ (\xi_i, \eta_j) \leftrightarrow (x_i, y_j) \]
2.5 贴体坐标系:椭圆型方程用于网格生成 ❷
数值求解方法
椭圆型 PDE常用方法:
- 有限差分
- 松弛法(relaxation)
度量系数:👉 用中心差分计算
\[ \left(\frac{\partial \xi}{\partial x}\right)_{i,j}=\frac{\xi_{i+1,j} - \xi_{i-1,j}}{x_{i+1,j} - x_{i-1,j}} \]
2.5 贴体坐标系:椭圆型方程用于网格生成 ❷
评注
- 椭圆方程用于生成平滑网格
- 需要完整边界条件
- 计算平面规则 → 物理平面非规则
- 网格质量由 PDE 控制
- 远场边界需足够远(特别是亚声速流)
- 近壁区域需加密网格
- 网格生成与流动物理无关、仅是坐标映射、Laplace 方程只是工具
2.6 自适应网格 ❶
在流场中:
- 梯度大的区域 → 需要密集网格
- 梯度小 → 可稀疏
平板边界层示例
边界层厚度:
\[ \delta = \delta(x) \]
若网格均匀:
- 第一层网格点满足 \(\Delta y > \delta\)
- ❌ 无法解析边界层
2.6 自适应网格 ❷
| 方法 | 特点 |
|---|---|
| 拉伸网格 | 预先生成,固定 |
| 椭圆网格 | 平滑生成,与流动无关 |
| 自适应网格 | 随流场变化动态调整 |
优势
- 在固定网格点数下提高精度
- 在给定精度下降低网格数量
2.6 自适应网格 ❸
一个典型自适应变换,网格步长定义为:
\[ \Delta x = \frac{B\,\Delta \xi}{1 + b\left(\frac{\partial g}{\partial x}\right)} \]
\[ \Delta y = \frac{C\,\Delta \eta}{1 + c\left(\frac{\partial g}{\partial y}\right)} \]
其中:
- \(g\):流场变量(如 \(p,\ \rho,\ T\))
- \(b,c\):调节参数
- \(B,C\):尺度因子
- 梯度大 → 分母大 → \(\Delta x,\Delta y\) 小 → 网格加密
- 梯度小 → 网格变稀
2.6 自适应网格 ❹
网格随时间演化
由于:
\[ \frac{\partial g}{\partial x},\quad \frac{\partial g}{\partial y} \]
随时间变化:👉 网格点位置也随时间变化
设第 \(N\) 个网格点:
\[ x_N^t = \sum_{i=1}^{N} (\Delta x)_i^t \]
下一时刻:
\[ x_N^{t+\Delta t} = \sum_{i=1}^{N} (\Delta x)_i^{t+\Delta t} \]
2.6 自适应网格 ❺
网格随时间演化
类似地:
\[ y_M^t = \sum_{i=1}^{M} (\Delta y)_i^t \]
\[ y_M^{t+\Delta t} = \sum_{i=1}^{M} (\Delta y)_i^{t+\Delta t} \]
时间导数(动网格)
\[ \left(\frac{\partial x}{\partial t}\right)_{\xi,\eta}=\frac{x_N^{t+\Delta t} - x_N^t}{\Delta t} \]
\[ \left(\frac{\partial y}{\partial t}\right)_{\xi,\eta}=\frac{y_M^{t+\Delta t} - y_M^t}{\Delta t} \]
2.6 自适应网格 ❻
坐标变换关系
设:
\[ x = x(\xi,\eta,t), \qquad y = y(\xi,\eta,t) \]
则:
\[ dx = \left(\frac{\partial x}{\partial \xi}\right)d\xi+ \left(\frac{\partial x}{\partial \eta}\right)d\eta+ \left(\frac{\partial x}{\partial t}\right)dt, \qquad dy = \left(\frac{\partial y}{\partial \xi}\right)d\xi+ \left(\frac{\partial y}{\partial \eta}\right)d\eta+ \left(\frac{\partial y}{\partial t}\right)dt \]
时间度量项
\[ \frac{\partial \xi}{\partial t} \neq 0, \quad \frac{\partial \eta}{\partial t} \neq 0 \]
👉 与固定网格不同!
2.6 自适应网格 ❼
推导结果
\[ \frac{\partial \xi}{\partial t}=-\frac{1}{J}\left[\left(\frac{\partial x}{\partial t}\right)\left(\frac{\partial y}{\partial \eta}\right)-\left(\frac{\partial y}{\partial t}\right)\left(\frac{\partial x}{\partial \eta}\right)\right] \]
\[ \frac{\partial \eta}{\partial t}=\frac{1}{J}\left[\left(\frac{\partial x}{\partial t}\right)\left(\frac{\partial y}{\partial \xi}\right)-\left(\frac{\partial y}{\partial t}\right)\left(\frac{\partial x}{\partial \xi}\right)\right] \]
其中:
\[ J = \frac{\partial x}{\partial \xi}\frac{\partial y}{\partial \eta}-\frac{\partial x}{\partial \eta}\frac{\partial y}{\partial \xi} \]
| 网格类型 | 时间项 |
|---|---|
| 固定网格 | \(\partial \xi/\partial t = 0\) |
| 自适应网格 | \(\partial \xi/\partial t \neq 0\) |
👉 这意味着:控制方程中必须包含网格运动项
2.6 自适应网格 ❽
示例:后向台阶流
- 网格自动聚集在:
- 激波
- 剪切层
- 分离区
- 自适应网格仍在发展中
- 有多种不同实现方法
- 现代 CFD 广泛使用
- 有多种不同实现方法
2.7 网格生成的现代发展与网格生成软件介绍 ❶
网格生成是 CFD 中:非常活跃的研究方向 例如:
F-20 战斗机:几何复杂、需要多块网格(multi-block)
现代方法通常结合:椭圆网格、自适应网格、多块结构
典型特征:网格在高梯度区域高度聚集、表面附近分辨率高、远场较稀疏
网格技术发展方向:
- 自适应
- 高质量
- 多块结构
- 自动化
2.7 网格生成的现代发展与网格生成软件介绍 ❷
在计算流体力学(CFD)中,网格质量直接决定计算精度与稳定性
ANSYS Meshing
- 集成在 ANSYS Workbench 中
- 操作简单,适合入门
- 支持:
- 非结构网格(四面体、六面体混合)
- 边界层加密(Inflation)
👉 适合: - 初学者 - 常规工程问题
2.7 网格生成的现代发展与网格生成软件介绍 ❸
ICEM CFD
- 工业级网格工具
- 支持:
- 结构网格(Hexa)
- 非结构网格(Tet)
- O-grid / C-grid
- Block结构非常强大(适合翼型、叶片)
👉 优点: - 网格质量高 - 可控性强
👉 缺点: - 学习曲线陡
👉 适合: - 高质量CFD计算 - 转捩 / 边界层问题
2.7 网格生成的现代发展与网格生成软件介绍 ❹
Pointwise
- 被称为“网格生成界的 CAD”
- 主要特点:
- 高质量结构/混合网格
- 边界拟合能力强
- 网格光滑度极高
👉 优点: - 非常适合: - 高超声速 - 转捩问题 - DNS / LES
👉 缺点: - 商业授权较贵
2.7 网格生成的现代发展与网格生成软件介绍 ❹
2.7 网格生成的现代发展与网格生成软件介绍 ❺
Star-CCM+(Simcenter)
- Siemens 出品
- 一体化 CFD 平台(含网格)
👉 特点: - 自动网格(polyhedral) - 对复杂几何非常友好
👉 优点: - 自动化程度高 - 工程效率高
👉 缺点: - 网格控制不如 ICEM 精细
2.7 网格生成的现代发展与网格生成软件介绍 ❺
2.7 网格生成的现代发展与网格生成软件介绍 ❻
Fluent Meshing
- ANSYS Fluent 内置网格模块
👉 特点: - 自动化网格生成 - Mosaic / Poly 网格
👉 适合: - 工程快速计算 - 复杂几何
2.7 网格生成的现代发展与网格生成软件介绍 ❻
2.7 网格生成的现代发展与网格生成软件介绍 ❼
Gmsh(开源工具)
- 轻量级
- 支持:
- 结构 / 非结构网格
- 脚本化建模(.geo)
👉 优点: - 免费 - 可编程 - 适合科研
👉 缺点: - GUI较简单 - 大规模问题略弱
2.7 网格生成的现代发展与网格生成软件介绍 ❽
OpenFOAM 自带工具
blockMesh
- 结构网格
- 完全可控
snappyHexMesh
- 非结构网格
- 支持 STL 几何
👉 优点: - 完全开源 - 与求解器无缝耦合
👉 缺点: - 调参复杂 - 学习成本高
2.7 网格生成的现代发展与网格生成软件介绍 ❾
GridPro
- 专注结构网格
- 航空航天常用
👉 特点: - 高质量 O/C 网格 - 多块结构
NUMECA (Autogrid)
- 主要用于:
- 涡轮机械
- 叶片网格
2.7 网格生成的现代发展与网格生成软件介绍 ❿
| 软件 | 类型 | 优势 | 适用场景 |
|---|---|---|---|
| ANSYS Meshing | 商业 | 易用 | 入门/工程 |
| ICEM CFD | 商业 | 高质量 | 精细CFD |
| Pointwise | 商业 | 极高质量 | 科研/DNS |
| Star-CCM+ | 商业 | 自动化 | 工程 |
| Gmsh | 开源 | 灵活 | 科研 |
| OpenFOAM | 开源 | 完整体系 | 定制开发 |
CFD 大作业:二维或三维流动数值模拟(6月3日随堂汇报)
一、作业内容
本次大作业要求同学们使用自编代码或开源 CFD 程序,完成一个二维或三维流动问题的数值模拟。流动可以是定常,也可以是非定常。
题目自选,例如:
- 二维圆形、二维方形、三维圆柱、三维球体、二维翼型或三维机翼绕流;
- 二维/三维方腔驱动流动;
- 激波管、激波反射流动;
- 喷管流动;
- 边界层流动;
- 后台阶流动;
- 射流、尾迹或剪切层流动;
- 其他 CFD 算例。
CFD 大作业:二维或三维流动数值模拟(6月3日随堂汇报)
二、基本要求
每个项目需至少体现 3 项 CFD 关键技术,包括但不限于:
- 网格技术
- 结构网格、非结构网格;
- 贴体网格;
- 网格拉伸;
- 坐标变换;
- 多块网格;
- 动网格或自适应网格。
CFD 大作业:二维或三维流动数值模拟(6月3日随堂汇报)
二、基本要求
每个项目需至少体现 3 项 CFD 关键技术,包括但不限于:
- 空间离散格式
- 中心格式、迎风格式;
- 高阶格式;
- MUSCL、ENO、WENO;
- 紧致差分格式。
- 时间推进方法
- 显式 Euler 方法;
- Runge-Kutta 方法;
- 隐式方法;
- LU-SGS;
- 双时间步方法。
CFD 大作业:二维或三维流动数值模拟(6月3日随堂汇报)
二、基本要求
每个项目需至少体现 3 项 CFD 关键技术,包括但不限于:
- 激波与间断处理
- Roe 格式;
- HLL/HLLC 格式;
- AUSM 格式;
- TVD 限制器;
- WENO 激波捕捉;
- 人工黏性方法;
- 激波装配方法。
CFD 大作业:二维或三维流动数值模拟(6月3日随堂汇报)
二、基本要求
每个项目需至少体现 3 项 CFD 关键技术,包括但不限于:
- 物理模型与边界条件
- 不可压/可压流动;
- 层流、RANS、LES;
- 无滑移壁面;
- 入口/出口边界;
- 远场边界;
- 周期边界;
- 对称边界。
CFD 大作业:二维或三维流动数值模拟(6月3日随堂汇报)
二、基本要求
每个项目需至少体现 3 项 CFD 关键技术,包括但不限于:
- 计算实现与后处理
- 收敛加速;
- 并行计算;
- 网格无关性分析;
- 误差分析;
- 流场可视化;
- 与理论解、实验结果或文献结果对比。
CFD 大作业:二维或三维流动数值模拟(6月3日随堂汇报)
三、完成方式
- 可个人完成,也可组队完成(但最多2人);
- 可自编代码(鼓励借助AI)
- 也可使用 OpenFOAM、SU2、Nek5000 等开源代码;
四、提交与汇报要求
- 最后一节课(6月3日)进行课堂 PPT 汇报和代码演示,汇报时间3分钟(个人)或6分钟(组队)。
- PPT 内容建议包括:1. 计算问题描述;2. 网格与边界条件;3. 采用的 CFD 关键技术;4. 计算结果,须包含现场演示;
- 最终提交材料包括: PPT; 代码文件;
CFD 大作业:二维或三维流动数值模拟(6月3日随堂汇报)
五、评分方式(占总成绩15%)
评分重点:
- 是否实现二维或三维流动数值模拟;
- 是否体现至少 3 项 CFD 关键技术;
- 数值方法选择是否合理;
- 结果是否可信;
- 图像展示是否清晰;
- 汇报逻辑是否完整;
- 是否体现独立思考能力。
建议选择难度适中的算例,不要求追求复杂几何或大规模计算。