流体力学核心贯通课 II
2025–2026 学年第二学期
北京理工大学 空天科学与技术学院
任杰
课程安排
- 课程出勤:占总成绩10%
- 平时作业:占总成绩10%
- 大作业:占总成绩15%
- 期末考试:占总成绩65%
大作业时间安排
- 第10周: 发布题目(5月9日)
- 第14周: 课堂展示答辩(6月3日)
- 第16周: 提交大作业报告和代码
第1章 基本方程及其性质
参考书
John D. Anderson Computational Fluid Dynamics: The Basics with Applications
McGraw-Hill, 1995任玉新 陈海昕
计算流体力学基础 清华大学出版社,2006张德良
计算流体力学教程 高等教育出版社,2010蔡庆东
计算流体动力学 北京大学本科生研究生专业基础课讲义,2018
真正理解 CFD 的最好方式,是自己实现数值算法并运行计算 - John D. Anderson
回忆:哪些流动具有精确解?
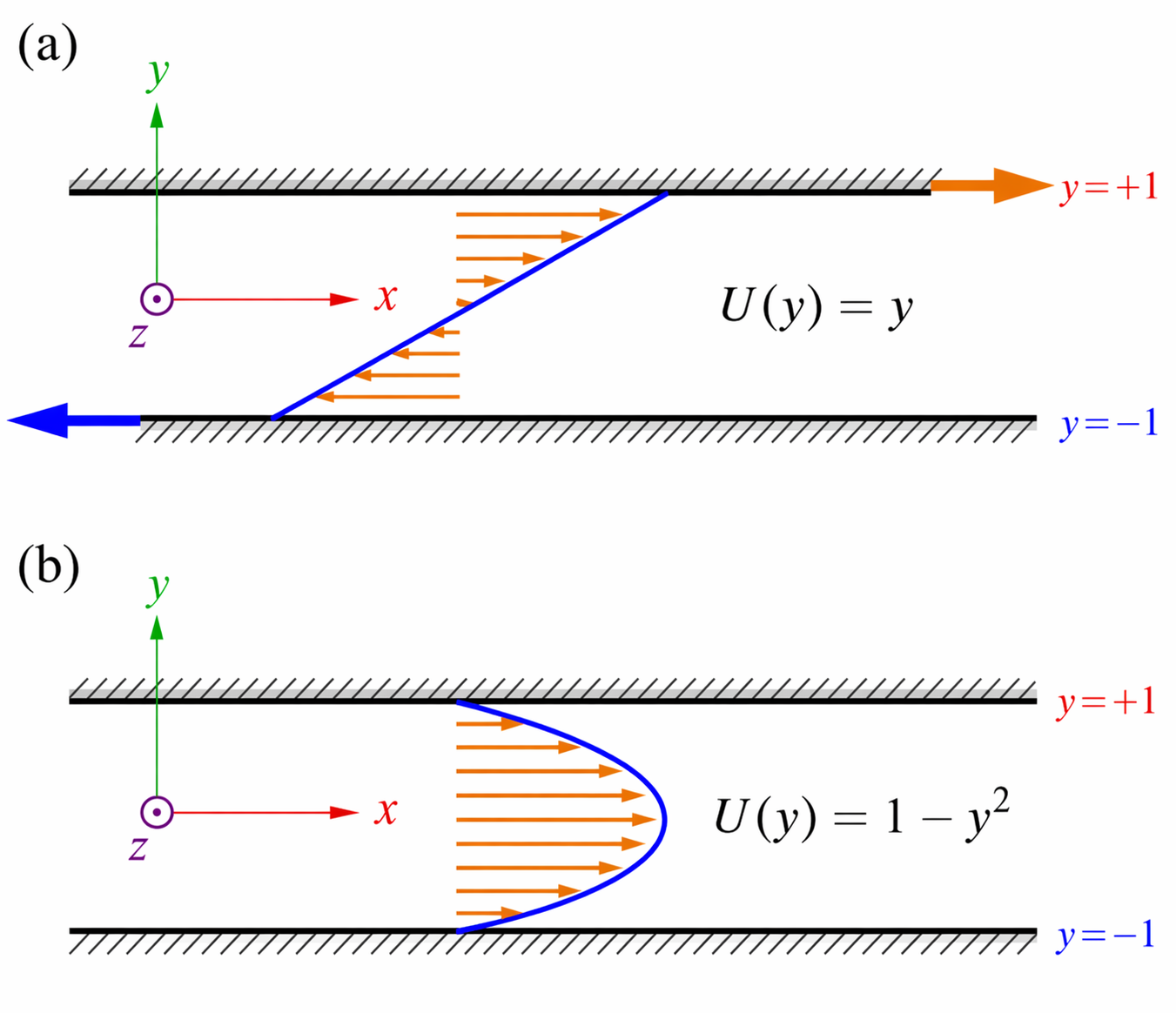
1. 平行剪切流(Couette Flow)
两平行平板之间的粘性流体流动,其中:
- 下壁面静止(或以恒定速度运动)
- 上壁面以恒定速度运动
- 压力梯度为零
- 控制方程:
\[ \frac{d^2 u}{dy^2}=0 \]
- 线性速度分布
2. 平板泊肃叶流(Plane Poiseuille Flow)
回忆:哪些流动具有精确解?
3. 圆管泊肃叶流(Hagen–Poiseuille Flow)
\[ -\frac{\mathrm{d}p}{\mathrm{d}z} +\mu \frac{1}{r}\frac{\mathrm{d}}{\mathrm{d}r} \left(r\frac{\mathrm{d}u}{\mathrm{d}r}\right)=0 \]
4. Stokes 第一问题(无限流体上方平板突然开始运动)
\[ u(y,t)=U\left[1-\operatorname{erf}\!\left(\frac{y}{2\sqrt{\nu t}}\right)\right] \]
5. Stokes 第二问题(振荡平板)
6. Taylor–Green 涡(二维周期性涡流)
- 验证 Navier–Stokes 求解器、验证耗散
7. Blasius 边界层(半解析解、自相似解)
这些精确解有什么共同特点?
👉几何简单、边界条件简单、方程被极度简化 (现实工程流体问题,基本没有解析解)
回顾:计算流体力学
在现代科学与工程中,流体力学问题通常具有以下特点:
- 几何结构复杂
- 控制方程高度非线性
- 伴随多种物理过程(湍流、化学反应、相变等)
这些问题往往无法通过解析方法求解,因此需要借助计算方法进行研究。
计算流体力学(Computational Fluid Dynamics, CFD)是利用数值方法与计算机技术求解流体力学控制方程的一门学科。
其核心思想是通过数值离散的方法,将连续的偏微分方程转化为可在计算机上求解的代数方程组,从而获得流场中的速度、压力、温度等物理量分布。
回顾:计算流体力学

回顾:计算流体力学
流体力学研究的三种方法
在流体力学的发展过程中,主要形成了三种互补的研究方法:
理论分析(Theoretical Analysis)
通过数学方法对流动方程进行解析求解,从而揭示基本物理规律。实验研究(Experimental Methods)
通过风洞、水槽等实验装置直接测量流动现象。数值模拟(Computational Methods)
通过计算机求解流体控制方程,获得流动的详细信息。
- 人工智能(Artificial Intelligence, AI)
👉 正在成为继理论、实验、数值之后的第四范式
传统上,理论与实验构成流体力学研究的两大支柱。然而随着计算机技术的发展,计算方法逐渐成为第三种重要研究手段。
因此,在现代工程实践中,流体问题通常通过 理论、实验与计算三者结合 的方式进行研究。
CFD在工程中的作用:NASA 阿尔忒弥斯2号(Artemis II)火箭
CFD在工程中的作用:NASA 阿尔忒弥斯2号(Artemis II)火箭
CFD在工程中的作用
随着计算能力的迅速提升,CFD 已成为工程设计和科学研究中的重要工具。典型应用包括:
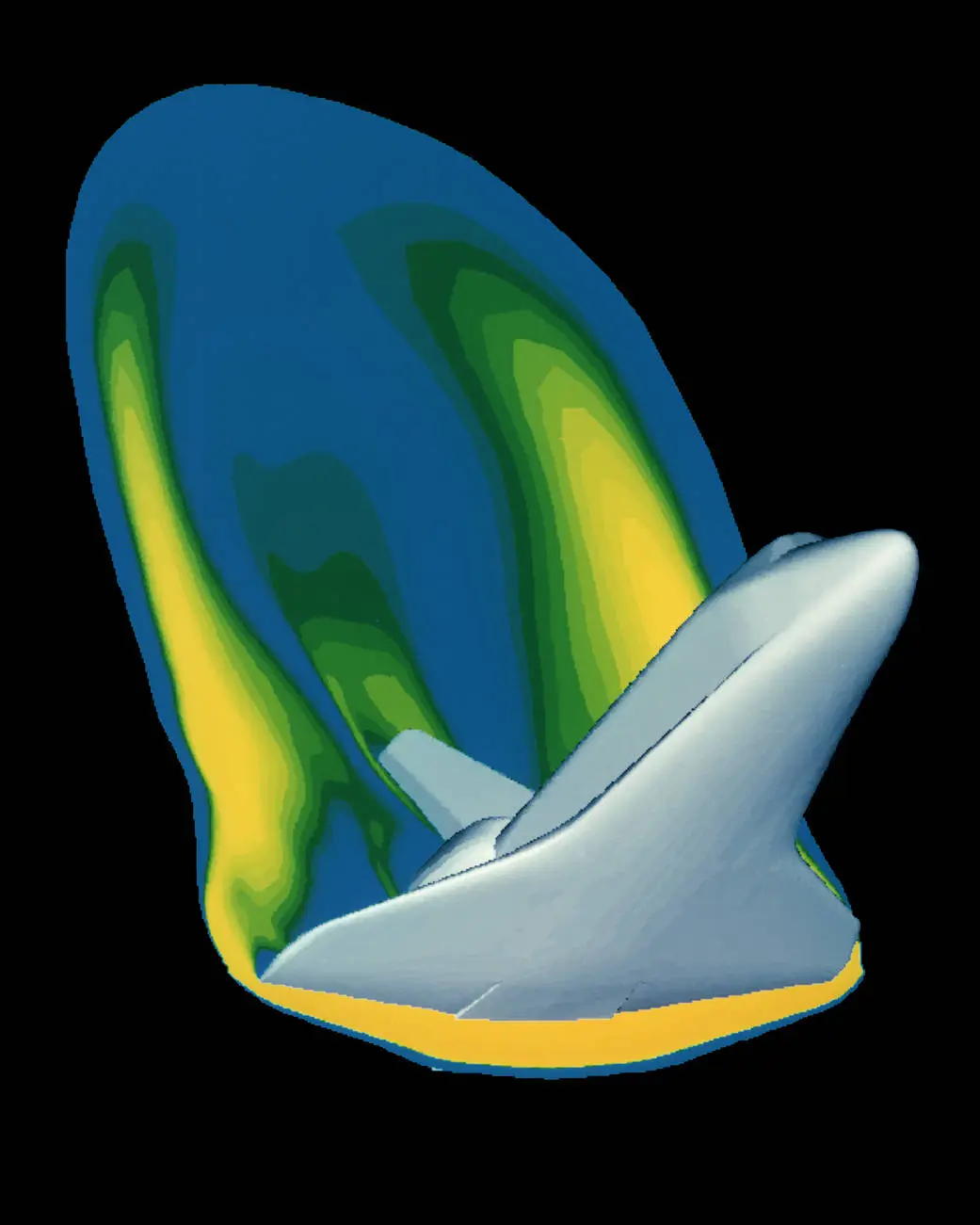
- 航空航天
- 飞机气动设计、再入气动加热、火箭喷流
- 汽车工程
- 车辆气动性能、发动机燃烧
- 能源系统
- 燃气轮机、核反应堆冷却
- 环境工程
- 大气污染扩散、城市风环境
CFD在工程中的作用 ❶
方程式赛车的CFD模拟
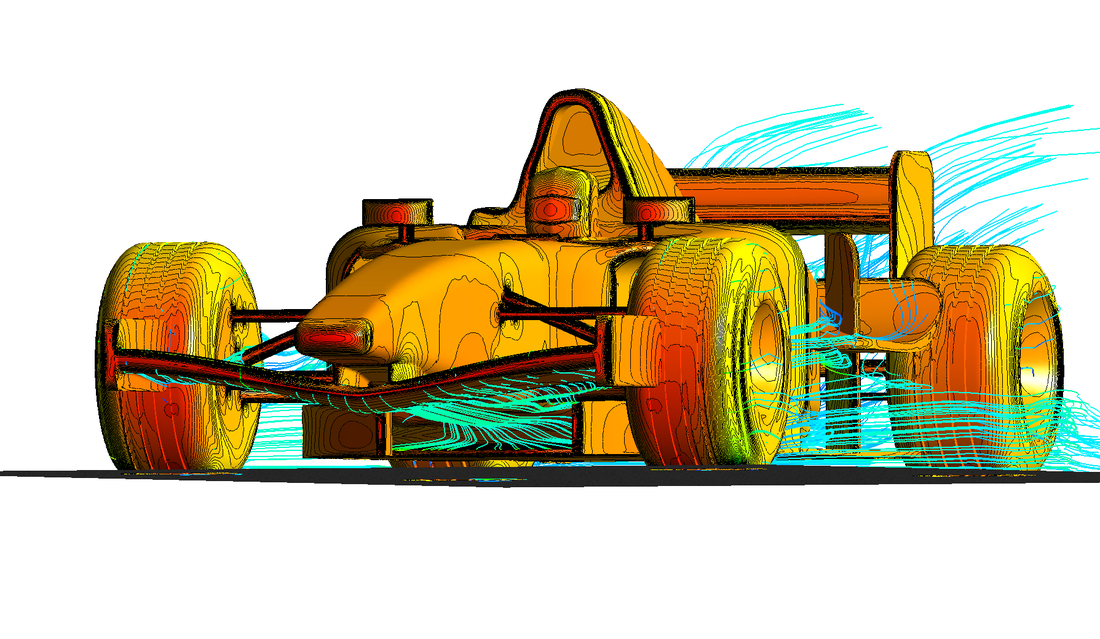
CFD在工程中的作用 ❶
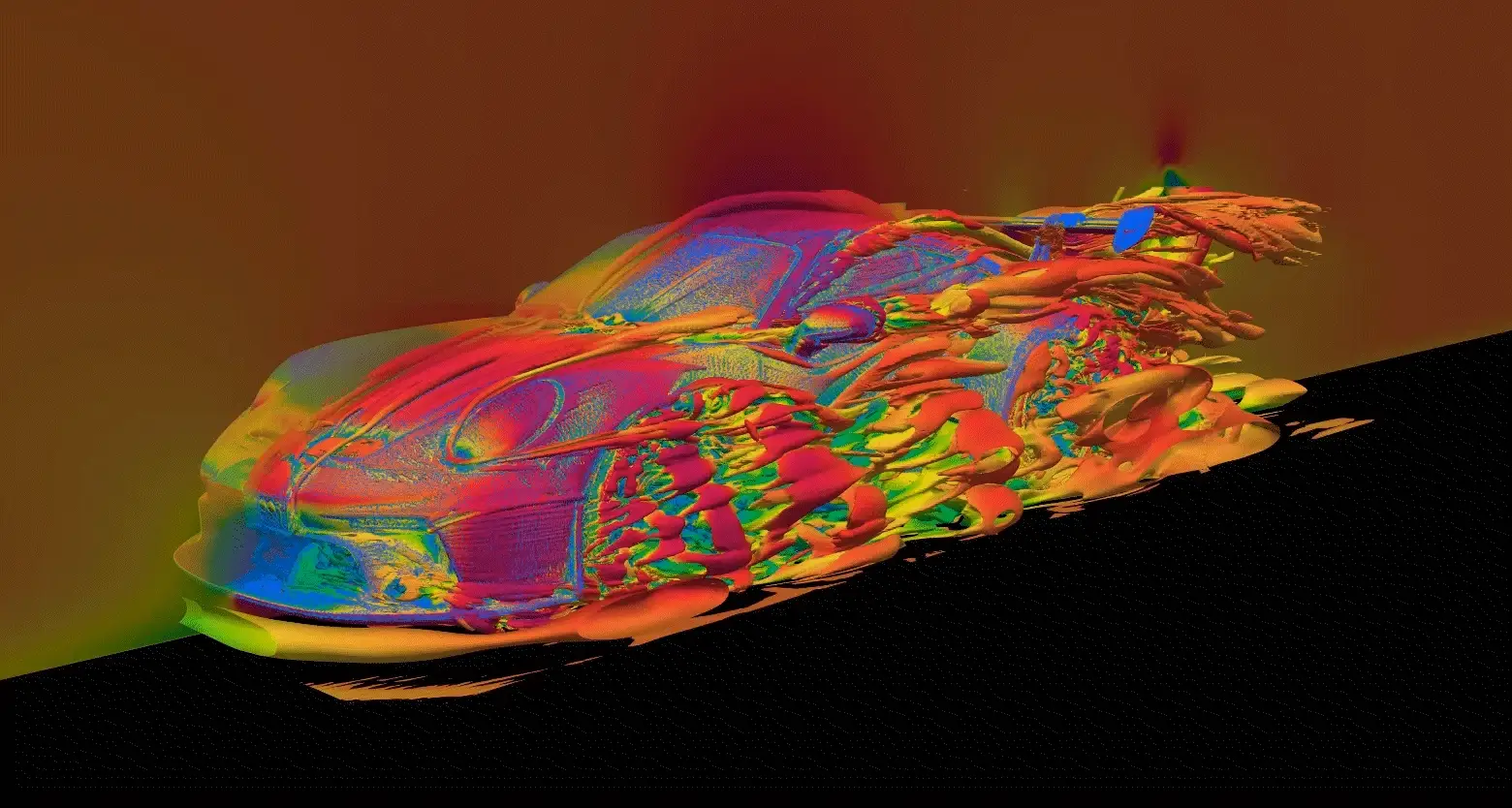
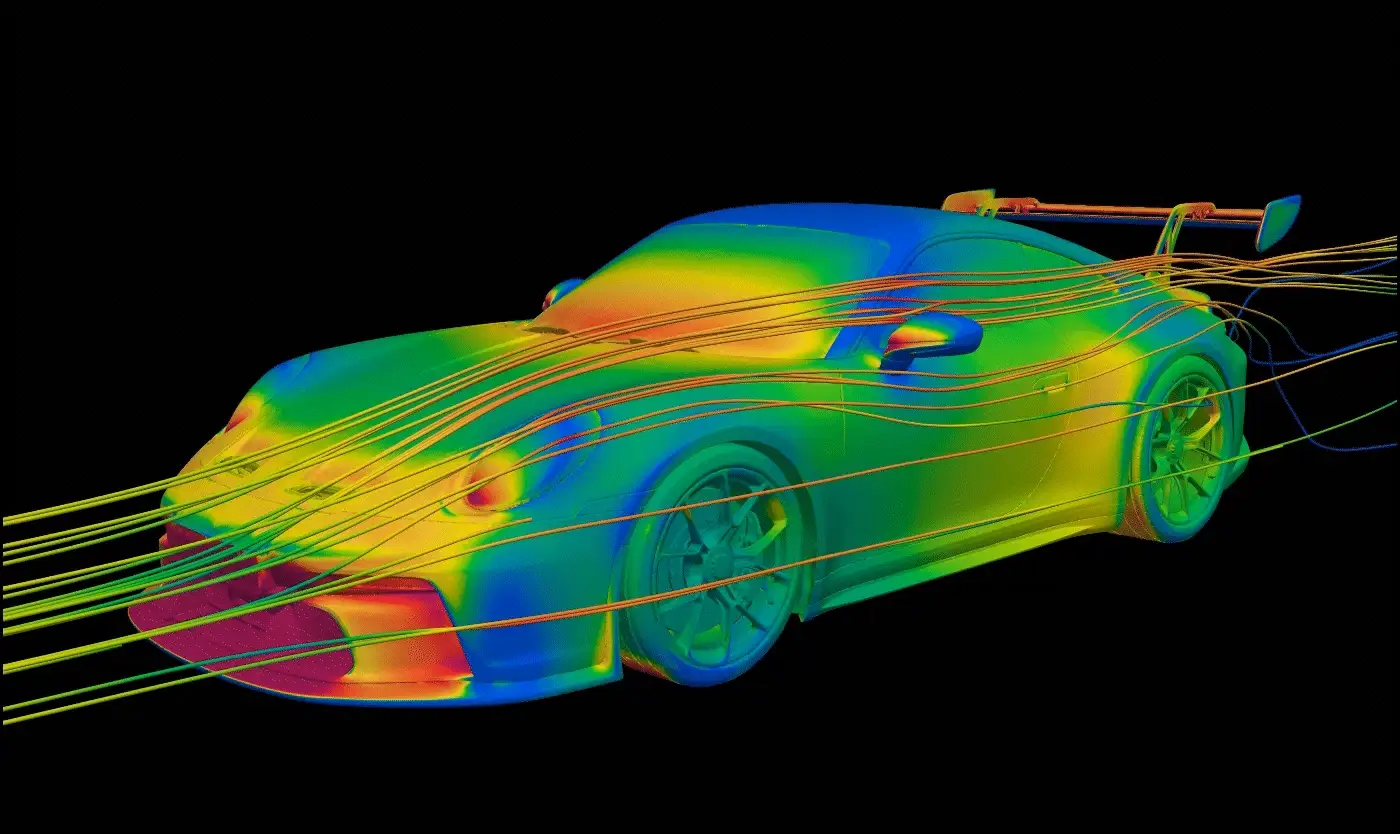
CFD在工程中的作用 ❷
Porsche 911的DES模拟
CFD在工程中的作用 ❸
埃菲尔铁塔的DDES和URANS模拟
CFD在工程中的作用 ❹
旋翼无人机叶片启动过程的数值模拟
CFD在工程中的作用 ❺
风力发电场的数值模拟
CFD在工程中的作用 ❺
CFD在工程中的作用 ❻
数值模拟旋转爆轰发动机非预混喷注系统

CFD在工程中的作用 ❼
超音速喷流的数值模拟

CFD在工程中的作用 ❽
大型鱼群的集体行为
CFD在工程中的作用 ❾
湍流边界层数值模拟

CFD在工程中的作用 ❿
超音速圆柱阵列流动数值模拟
CFD在工程中的作用 ❿
CFD在工程中的作用 ⓫
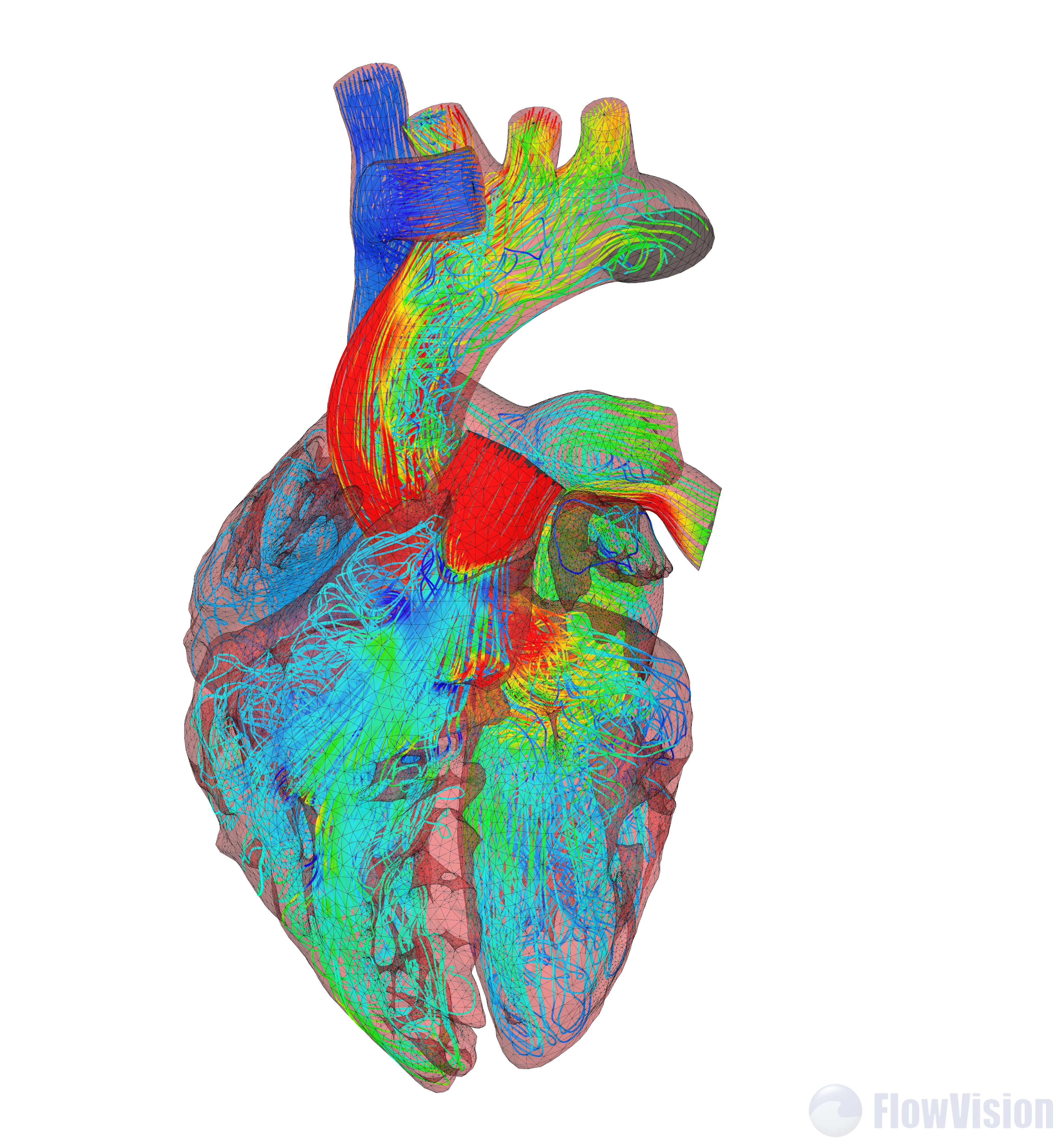
CFD 的一个重要优势是可以提供完整的流场信息,例如
- 速度场、压力场、温度场(这些信息在实验中往往难以全部获得)

- 流体力学界的“视觉大片发布会”(APS主办,每年一届)
- 全球科研团队参赛,比的不只是理论,更重要的是“谁的更好看”
- 评审标准:既要科学过硬,也要颜值在线
- 优秀作品将获得 Milton Van Dyke Award / Gallery Winner(相当于流体界“奥斯卡”)
1.1 控制方程 ❶
连续方程(Continuity Equation)
实体形式(向量形式):
\[ \frac{\partial \rho}{\partial t}+\nabla\cdot(\rho\mathbf{u})=0 \]
笛卡尔坐标系分量形式(Einstein 求和约定):
\[\frac{\partial \rho}{\partial t}+\frac{\partial (\rho u_i)}{\partial x_i}=0\]
不可压缩流体(\(\rho=\text{const}\)):
\[ \frac{\partial u_i}{\partial x_i}=0 \]
什么是 Einstein 求和约定(Einstein Summation Convention)?
1.1 控制方程 ❷
Einstein 求和约定(Einstein Summation Convention)
在指标记号中,如果某个指标在同一项中 重复出现两次,则默认对该指标在所有空间方向求和,而不必显式写出求和符号 \(\sum\)。
例1:在三维空间中
\[a_i b_i=\sum_{i=1}^{3}a_i b_i\]
例2:速度散度
\[\frac{\partial u_i}{\partial x_i}=\frac{\partial u}{\partial x}+\frac{\partial v}{\partial y}+\frac{\partial w}{\partial z}\]
优点
- 表达式 更紧凑
- 便于 理论推导与数值分析
1.1 控制方程 ❸
动量方程(Momentum Conservation)
\[ \frac{\partial (\rho \mathbf{u})}{\partial t} + \nabla \cdot (\rho \mathbf{u}\mathbf{u}) = -\nabla p + \nabla \cdot \boldsymbol{\tau} + \rho \mathbf{f} \]
笛卡尔坐标系分量形式为
\[\frac{\partial (\rho u_i)}{\partial t}+\frac{\partial (\rho u_i u_j)}{\partial x_j}=-\frac{\partial p}{\partial x_i}+\frac{\partial \tau_{ij}}{\partial x_j}+\rho f_i\]
对于牛顿流体,
\[\tau_{ij}=\mu\left(\frac{\partial u_i}{\partial x_j}+\frac{\partial u_j}{\partial x_i}\right)-\frac{2}{3}\mu\frac{\partial u_k}{\partial x_k}\delta_{ij}\]
\(\tau_{ij}\) 为粘性应力张量,其中 \(\delta_{ij}\) 为 Kronecker delta
为何会出现 \(2/3\) ?
1.1 控制方程 ❹
Stokes 假设
各向同性牛顿流体中,黏性应力与速度梯度线性相关:
\[ \tau_{ij} = 2\mu S_{ij} + \lambda (\nabla \cdot \mathbf{u}) \delta_{ij} \]
其中
\[ S_{ij}=\frac{1}{2}\left(\frac{\partial u_i}{\partial x_j}+\frac{\partial u_j}{\partial x_i}\right) \]
- \(\mu\):剪切黏度
- \(\lambda\):体黏度(第二黏度)
- Stokes 假设:\(\lambda = -\frac{2}{3}\mu\)
1.1 控制方程 ❺
Stokes 假设
关键要求:黏性应力不包含各向同性部分(由压力单独承担)
应力分解
\[ \sigma_{ij} = -p\delta_{ij} + \tau_{ij} \]
- \(-p\delta_{ij}\):各向同性压力
- \(\tau_{ij}\):偏差应力(粘性应力,仅描述形变)
👉 单位张量 \(\delta_{ij}\) 是唯一各向同性二阶张量,其强度由“迹”决定
1.1 控制方程 ❻
Stokes 假设
\[ \boldsymbol{\tau}=\begin{bmatrix} 2\mu\dfrac{\partial u}{\partial x}+\lambda\nabla\cdot\mathbf{u} & \mu\left(\dfrac{\partial u}{\partial y}+\dfrac{\partial v}{\partial x}\right) & \mu\left(\dfrac{\partial u}{\partial z}+\dfrac{\partial w}{\partial x}\right)\\[1.0em] \mu\left(\dfrac{\partial v}{\partial x}+\dfrac{\partial u}{\partial y}\right) & 2\mu\dfrac{\partial v}{\partial y}+\lambda\nabla\cdot\mathbf{u} & \mu\left(\dfrac{\partial v}{\partial z}+\dfrac{\partial w}{\partial y}\right)\\[1.0em] \mu\left(\dfrac{\partial w}{\partial x}+\dfrac{\partial u}{\partial z}\right) & \mu\left(\dfrac{\partial w}{\partial y}+\dfrac{\partial v}{\partial z}\right) & 2\mu\dfrac{\partial w}{\partial z}+\lambda\nabla\cdot\mathbf{u} \end{bmatrix} \]
其迹为: \[ \tau_{kk} = (2\mu + 3\lambda)(\nabla \cdot \mathbf{u}) \]
Stokes 假设令
\[ \tau_{kk} = 0 \quad \Rightarrow \quad \lambda = -\frac{2}{3}\mu \]
1.1 控制方程 ❼
能量方程(Energy Conservation)
\[ \frac{\partial (\rho E)}{\partial t} + \nabla \cdot \left[(\rho E + p)\mathbf{u}\right] = \nabla \cdot (\boldsymbol{\tau}\cdot\mathbf{u}) - \nabla \cdot \mathbf{q} + \rho \mathbf{f}\cdot\mathbf{u} \]
分量形式
\[ \frac{\partial (\rho E)}{\partial t}+\frac{\partial}{\partial x_j}\left[(\rho E+p)u_j\right]=\frac{\partial}{\partial x_j}\left(\tau_{ij}u_i\right)-\frac{\partial q_j}{\partial x_j}+\rho f_i u_i \]
其中
- \(E\) 表示什么?
\[ E = e + \frac{1}{2}(u^2 + v^2 + w^2) \]
表示单位质量的总能量(total energy per unit mass)
1.1 控制方程 ❽
CFD常用守恒形式方程
在计算流体力学中,三大守恒律通常写成统一形式:
\[ \frac{\partial \mathbf{U}}{\partial t} + \nabla \cdot \mathbf{F} = \nabla \cdot \mathbf{F}_v + \mathbf{S} \]
对于三维可压缩流
\[ \mathbf{U}= \begin{bmatrix} \rho\\ \rho u_1\\ \rho u_2\\ \rho u_3\\ \rho E \end{bmatrix}, \qquad \mathbf{F}_j= \begin{bmatrix} \rho u_j\\ \rho u_1u_j+p\delta_{1j}\\ \rho u_2u_j+p\delta_{2j}\\ \rho u_3u_j+p\delta_{3j}\\ (\rho E+p)u_j \end{bmatrix}, \qquad \mathbf{F}_{v,j}= \begin{bmatrix} 0\\ \tau_{1j}\\ \tau_{2j}\\ \tau_{3j}\\ \tau_{ij}u_i-q_j \end{bmatrix}, \qquad \mathbf{S}= \begin{bmatrix} 0\\ \rho f_1\\ \rho f_2\\ \rho f_3\\ \rho f_i u_i \end{bmatrix} \]
其中
热流:\(q_j=-\kappa\frac{\partial T}{\partial x_j}\).
\((\nabla \cdot \mathbf{F})=\frac{\partial F_{k j}}{\partial x_j}\),\(k=1,\dots,5\)(方程编号),\(j=1,2,3\)(空间方向)
1.1 控制方程 ❾
守恒形式方程的意义
\[ \frac{\partial \mathbf{U}}{\partial t} + \nabla \cdot \mathbf{F} = \nabla \cdot \mathbf{F}_v + \mathbf{S} \]
该统一形式具有三个重要特点:
- 守恒性:适用于有限体积法
- 统一结构:三大方程可同时离散
- 便于构造数值通量:如Riemann求解器、Godunov方法等
因此这是 现代CFD代码(OpenFOAM、SU2、Fluent等)普遍采用的基本方程形式。
1.1 控制方程 ❿
评注
- Navier–Stokes 的现代含义
- 传统:仅动量方程
- 现代:连续 + 动量 + 能量 = Navier–Stokes 👉 “NS解” = 完整粘性流动求解
- 什么是欧拉方程(Euler Equations)?
- 传统:仅动量方程
- 非线性耦合系统
- 控制方程为耦合的非线性偏微分方程组、解析解极其困难(目前无一般闭式解)
- 守恒形式 vs 非守恒形式
- 👉 差别仅在左端项
- 守恒形式也称为散度形式(\(\nabla \cdot (\cdot)\)),是有限体积法离散的基础
- 方程封闭问题
- 方程数:5、未知数:?(\(\rho,u,v,w,T,p,e\))
- 👉 需要补充:状态方程 \(p=\rho RT\)、热力学关系:\(e=c_v T\),才能闭合系统
1.1 控制方程 ⓫
CFD的基本步骤
✔ 前两步已经完成(物理建模 + 控制方程建立)
建立物理模型
写出控制方程(Navier–Stokes 方程等)
给定初始条件与边界条件
对方程进行数值离散
求解离散方程组
对计算结果进行分析与验证
1.1 控制方程 ⓬
CFD中常用的分量形式方程(常用、重要)
\[ \frac{\partial \mathbf{U}}{\partial t}+\frac{\partial \mathbf{F}}{\partial x}+\frac{\partial \mathbf{G}}{\partial y}+\frac{\partial \mathbf{H}}{\partial z}= \mathbf{J} \]
- 所有方程(质量/动量/能量)统一写法,便于编程实现
- 守恒量的时间变化 = 空间通量变化 + 源项
守恒变量(Solution Vector)
\[ \mathbf{U}= \begin{bmatrix} \rho\\ \rho u\\ \rho v\\ \rho w\\ \rho\left(e+\frac{u^2 + v^2 + w^2}{2}\right) \end{bmatrix} \]
1.1 控制方程 ⓭
CFD中常用的分量形式方程
x方向通量(Flux in x)
\[ \mathbf{F}= \begin{bmatrix} \rho u\\ \rho u^2 + p - \tau_{xx}\\ \rho uv - \tau_{xy}\\ \rho uw - \tau_{xz}\\ \rho u\left(e+\frac{V^2}{2}\right) + pu - q_x - u\tau_{xx} - v\tau_{xy} - w\tau_{xz} \end{bmatrix} \]
y方向通量(Flux in y)
\[ \mathbf{G}= \begin{bmatrix} \rho v\\ \rho uv - \tau_{yx}\\ \rho v^2 + p - \tau_{yy}\\ \rho vw - \tau_{yz}\\ \rho v\left(e+\frac{V^2}{2}\right) + pv - q_y - u\tau_{yx} - v\tau_{yy} - w\tau_{yz} \end{bmatrix} \]
1.1 控制方程 ⓮
CFD中常用的分量形式方程
z方向通量(Flux in z)
\[ \mathbf{H}= \begin{bmatrix} \rho w\\ \rho uw - \tau_{zx}\\ \rho vw - \tau_{zy}\\ \rho w^2 + p - \tau_{zz}\\ \rho w\left(e+\frac{V^2}{2}\right) + pw - q_z - u\tau_{zx} - v\tau_{zy} - w\tau_{zz} \end{bmatrix} \]
源项(Source Term)
\[ \mathbf{J}= \begin{bmatrix} 0\\ \rho f_x\\ \rho f_y\\ \rho f_z\\ \rho(f_x u + f_y v + f_z w) + \dot{q} \end{bmatrix} \]
1.1 控制方程 ⓯
CFD真正求解的变量
守恒变量: \[ \rho,\ \rho u,\ \rho v,\ \rho w,\ \rho E \]
特征变量: \[ u,\ v,\ w,\ p,\ e \]
👉 CFD:先求守恒变量,再还原物理量
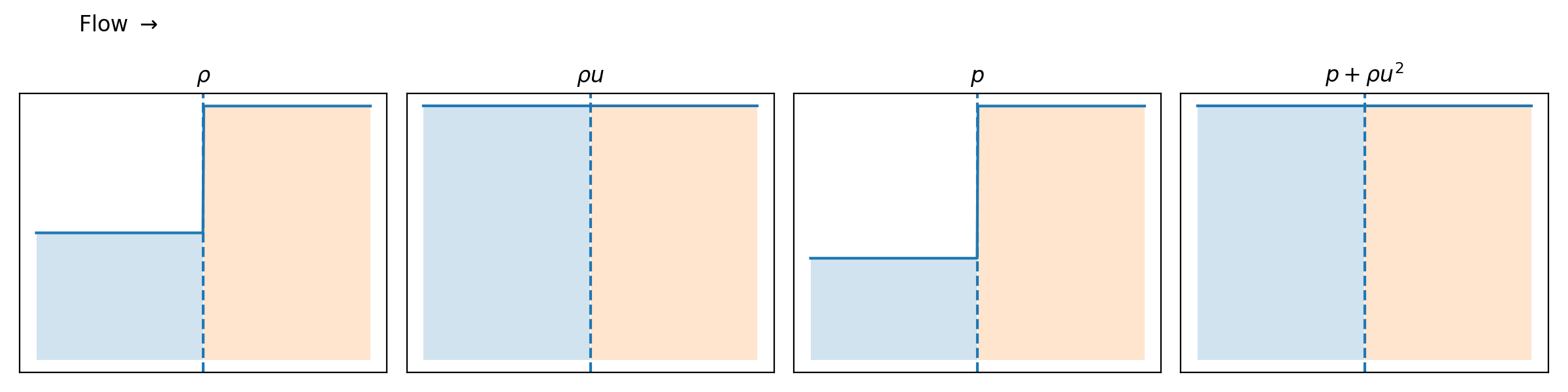
1.2 激波问题 ❶
激波处:守恒量 vs 通量的连续性
- 守恒量一般不连续
- 通量是连续的(满足守恒律)
守恒量在激波处
- 密度 \(\rho\) ❌ 不连续
- 速度 \(u\) ❌ 不连续
- 压力 \(p\) ❌ 不连续
- 温度 \(T\) ❌ 不连续
👉 激波本质就是不连续面
1.2 激波问题 ❷
通量(F)在激波处
以一维为例:
质量守恒:
\[ \rho_1 u_1 = \rho_2 u_2 \]
动量守恒:
\[ \rho_1 u_1^2 + p_1 = \rho_2 u_2^2 + p_2 \]
能量守恒:
\[ \rho_1 u_1\left(e_1 + \frac{u_1^2}{2}\right) + p_1 u_1= \rho_2 u_2\left(e_2 + \frac{u_2^2}{2}\right) + p_2 u_2 \]
👉 本质上:
\[ F(U_1) = F(U_2) \]
✔ 即:通量在激波两侧相等(连续)
1.2 激波问题 ❸
为什么会这样?
守恒形式积分后:
\[ \frac{d}{dx}F(U)=0 \quad \Rightarrow \quad F = \text{常数} \]
- 激波虽是“跳跃”,但: 守恒律必须成立
- 守恒量:可以“跳变”(状态改变)
- 通量:必须“守恒”(流量不丢失)
👉 类比:
- 水密度可以变,但单位时间通过的质量必须一样
- 激波是“状态不连续”,但“通量连续”
- 这正是守恒形式在CFD中如此重要的根本原因
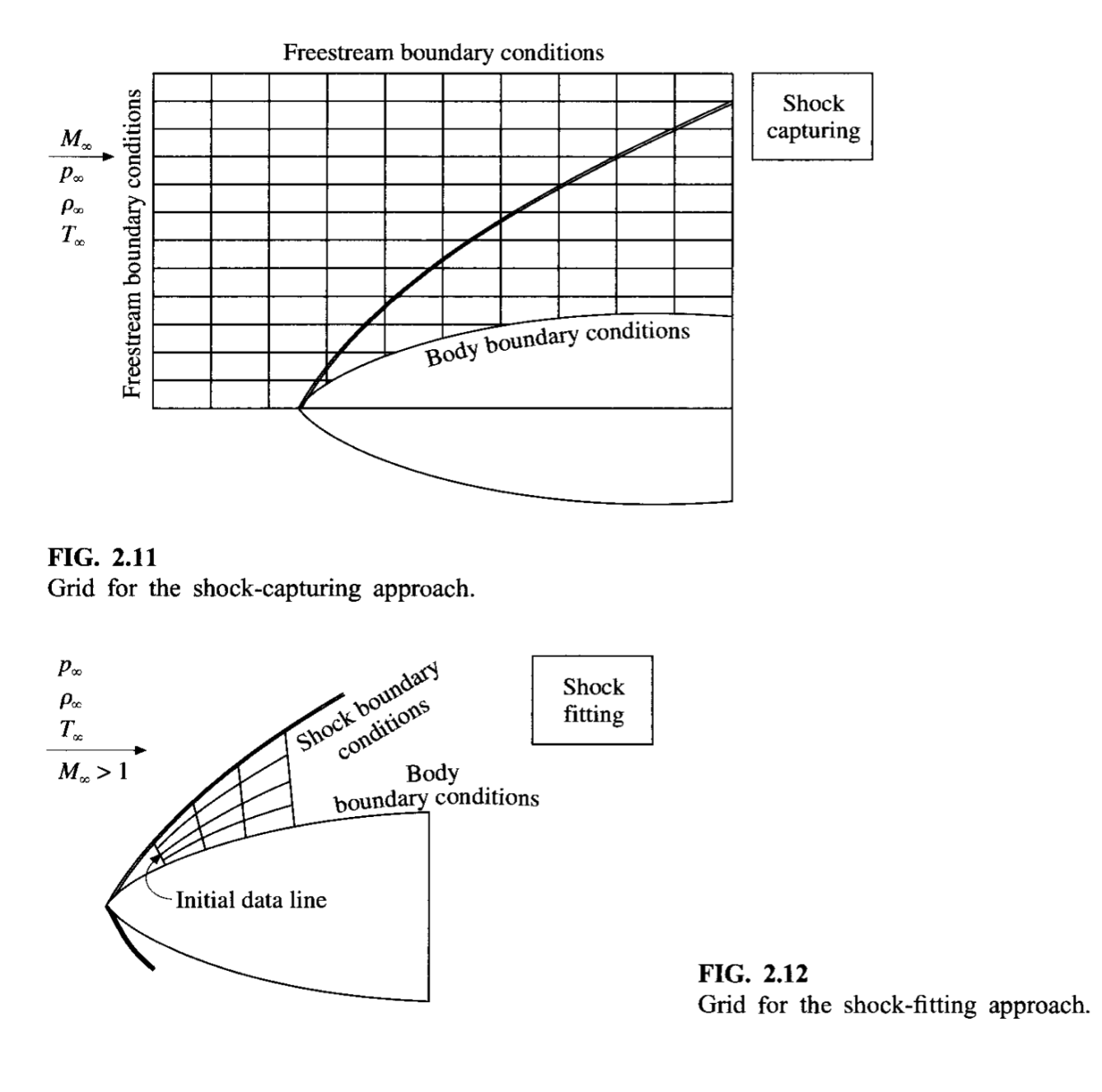
1.2 激波问题 ❹
介绍:两种激波处理思路
Shock Capturing(激波捕捉)
- 激波自然形成
- 简单,但有数值扩散
Shock Fitting(激波装配)
- 显式追踪激波
- 精确,但复杂
1.3 边界条件
边界条件的作用
- 决定控制方程的具体解
- 是流动问题的“真正驱动力”
- CFD中:边界条件处理至关重要
边界条件举例
无滑移条件: \[ u = v = w = 0 \]
温度条件: \[ T = T_w\]
或给定热流(Fourier定律): \[ \frac{\partial T}{\partial n} = -\frac{q_w}{k} \]
1.3 边界条件
边界条件举例
- 入口 / 出口条件
- 远场条件(自由来流)
物理边界条件本质只有:
- 速度条件
- 温度/热流条件
👉 压力、密度:由方程求解得到
边界条件的合理性与实现精度至关重要,是当前 CFD 研究中的一个重要方向
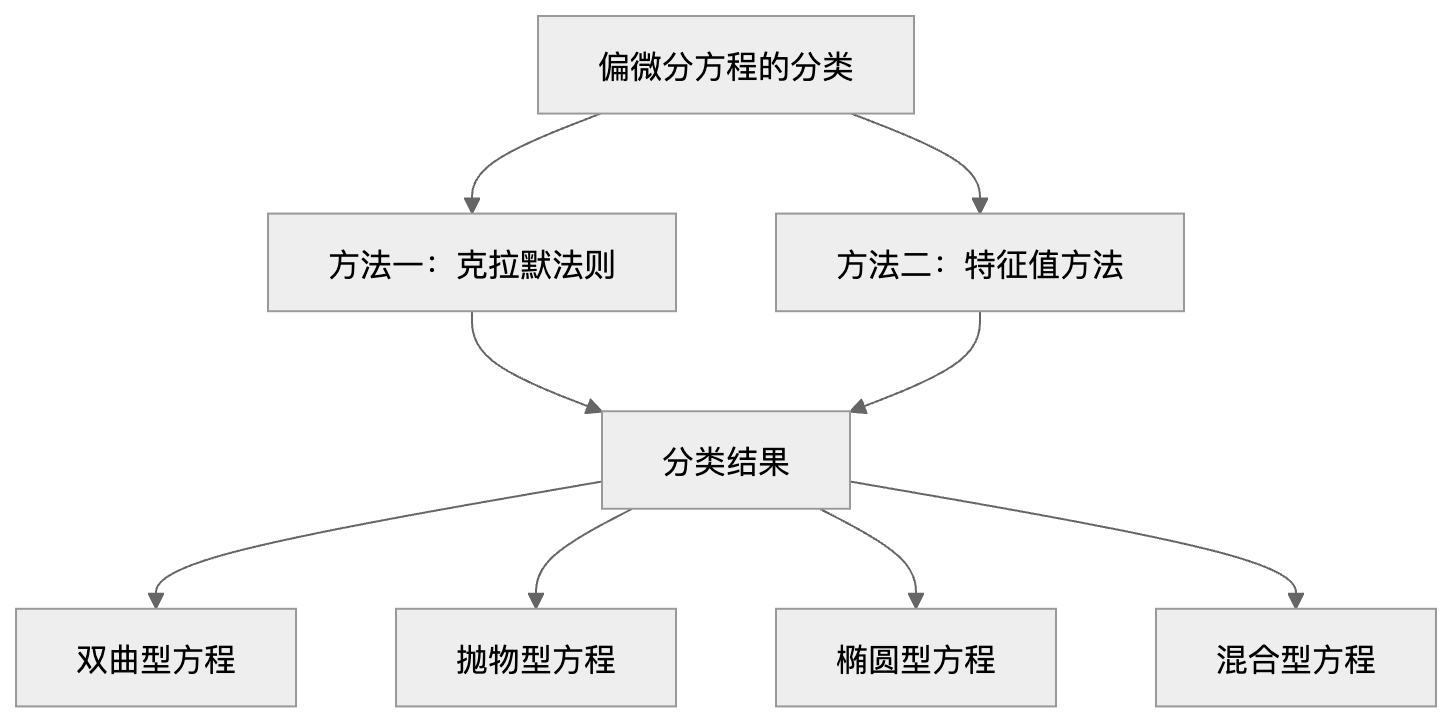
1.4 偏微分方程的数学性质 ❶
核心问题
- PDE 为什么要分类?
- 不同类型 PDE 有什么物理意义?
- 为什么 CFD 数值方法必须“因方程而异”?
👉 核心结论:
- 方程的数学类型 = 流动的信息传播方式
- 适配的数值求解策略取决于方程类型
1.4 偏微分方程的数学性质 ❷
考虑一阶拟线性方程组
对于二阶偏微分方程(组) ,可以通过降阶的方法化为一阶拟线性方程组。
\[ a_1 \frac{\partial u}{\partial x} + b_1 \frac{\partial u}{\partial y}+ c_1 \frac{\partial v}{\partial x} + d_1 \frac{\partial v}{\partial y} = f_1 \]
\[ a_2 \frac{\partial u}{\partial x} + b_2 \frac{\partial u}{\partial y}+ c_2 \frac{\partial v}{\partial x} + d_2 \frac{\partial v}{\partial y} = f_2 \]
定义全微分:
\[ du = \frac{\partial u}{\partial x}dx + \frac{\partial u}{\partial y}dy \]
\[ dv = \frac{\partial v}{\partial x}dx + \frac{\partial v}{\partial y}dy \]
1.4 偏微分方程的数学性质 ❷
方程组的矩阵形式
方程组 \[ a_1 \frac{\partial u}{\partial x} + b_1 \frac{\partial u}{\partial y}+ c_1 \frac{\partial v}{\partial x} + d_1 \frac{\partial v}{\partial y} = f_1 \]
\[ a_2 \frac{\partial u}{\partial x} + b_2 \frac{\partial u}{\partial y}+ c_2 \frac{\partial v}{\partial x} + d_2 \frac{\partial v}{\partial y} = f_2 \]
写为矩阵形式:
\[ \begin{bmatrix} a_1 & b_1 & c_1 & d_1 \\ a_2 & b_2 & c_2 & d_2 \\ dx & dy & 0 & 0 \\ 0 & 0 & dx & dy \end{bmatrix}\begin{bmatrix} \frac{\partial u}{\partial x} \\ \frac{\partial u}{\partial y} \\ \frac{\partial v}{\partial x} \\ \frac{\partial v}{\partial y} \end{bmatrix}=\begin{bmatrix} f_1 \\f_2 \\du \\dv \end{bmatrix} \]
1.4 偏微分方程的数学性质 ❷
使用 Cramer 法则,令
\[ [A] =\begin{bmatrix} a_1 & b_1 & c_1 & d_1 \\ a_2 & b_2 & c_2 & d_2 \\ dx & dy & 0 & 0 \\ 0 & 0 & dx & dy \end{bmatrix} \]
将第一列替换为右端项:
\[ [B] = \begin{bmatrix} f_1 & b_1 & c_1 & d_1 \\ f_2 & b_2 & c_2 & d_2 \\ du & dy & 0 & 0 \\ dv & 0 & dx & dy \end{bmatrix} \]
则:
\[ \frac{\partial u}{\partial x} = \frac{|B|}{|A|} \]
1.4 偏微分方程的数学性质 ❷
Cramer 法则(克莱默法则)回顾
对于线性方程组:
\[ A \mathbf{x} = \mathbf{b} \]
适用条件
- 系数矩阵 \(A\) 必须是方阵
- \(\det(A) \ne 0\)(行列式不为 0)
例如二元方程组
\[ \begin{cases} a_{11} x + a_{12} y = b_1 \\ a_{21} x + a_{22} y = b_2 \end{cases} \]
系数行列式
\[ D = \begin{vmatrix} a_{11} & a_{12} \\ a_{21} & a_{22} \end{vmatrix} \]
1.4 偏微分方程的数学性质 ❷
Cramer 法则(克莱默法则)回顾
分别替换列
👉 求 \(x\):把第1列换成右端列向量
\[ D_x = \begin{vmatrix} b_1 & a_{12} \\ b_2 & a_{22} \end{vmatrix} \]
👉 求 \(y\):把第2列换成右端列向量
\[ D_y = \begin{vmatrix} a_{11} & b_1 \\ a_{21} & b_2 \end{vmatrix} \]
直接得到解
\[ x = \frac{D_x}{D}, \quad y = \frac{D_y}{D} \]
1.4 偏微分方程的数学性质 ❷
Cramer 法则(克莱默法则)回顾
- 原方程组的信息 → 全部在行列式 \(D\)
- 想求某个变量 → 用“常数列替换对应列”
- 每个变量 = “替换后的行列式” ÷ “原行列式”
优点
- 公式直接,适合理解理论
- 小规模(2×2、3×3)很方便
缺点
- 计算量大(不适合大规模)
- 数值计算中几乎不用(更常用高斯消元)
1.4 偏微分方程的数学性质 ❷
几何意义
在点 \(P\):
- 沿某方向移动微小距离 \(ds\)
- 坐标变化:
- \(dx\)
- \(dy\)
- 函数变化:
- \(du\)
- \(dv\)
👉 这些量正是矩阵中的变量 👉 不同方向(不同 \(dx, dy\)):
- 得到的 \(\partial u/\partial x\) 相同
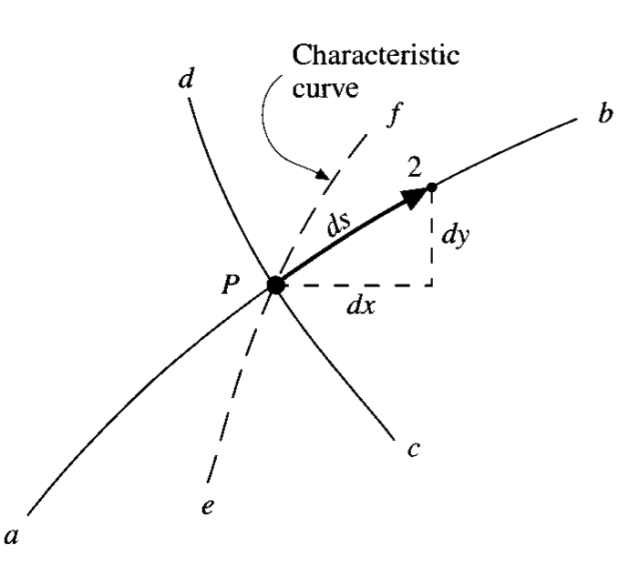
1.4 偏微分方程的数学性质 ❷
几何意义
但是,有一个重要的例外!
如果选择某个方向,使:
\[ |A| = 0 \]
则:
- Cramer 法则失效(分母为 0)
- \(\partial u/\partial x\) 无法确定
1.4 偏微分方程的数学性质 ❷
特征线的定义
👉 当:
\[ |A| = 0 \]
对应方向:特征方向(Characteristic direction)
对应曲线:特征线(Characteristic curve)
物理含义
在特征线上:
- 导数无法确定(indeterminate)
- 解可能出现:
- 不连续
- 奇异性
👉 本质:PDE 在该方向上“退化”
1.4 偏微分方程的数学性质 ❷
为了得到特征方向和特征线,展开行列式:
\[ |A|=(a_1c_2 - a_2c_1)(dy)^2- (a_1d_2 - a_2d_1 + b_1c_2 - b_2c_1) dx\,dy+ (b_1d_2 - b_2d_1)(dx)^2 = 0 \]
令 \[ a = (a_1c_2 - a_2c_1), \quad b = - (a_1d_2 - a_2d_1 + b_1c_2 - b_2c_1), \quad c = (b_1d_2 - b_2d_1) \] 得到 \[ a \left(\frac{dy}{dx}\right)^2+ b \left(\frac{dy}{dx}\right)+ c = 0 \]
判别式:
\[ D = b^2 - 4ac \]
1.4 偏微分方程的数学性质 ❷
- \(D > 0\):两条特征线、双曲型(Hyperbolic)
- \(D = 0\):一条特征线、抛物型(Parabolic)
- \(D < 0\):零条特征线、椭圆型(Elliptic)
物理本质对比
| 类型 | 数学特征 | 典型方程 | 物理/计算特征 |
|---|---|---|---|
| 双曲型 | 有两组实特征方向 | 波动方程、Euler方程 | 扰动沿特征线以有限速度传播,解与初始条件关系密切 |
| 抛物型 | 有一组实特征方向 | 热传导方程、边界层方程 | 具有“沿主方向推进”的特点 |
| 椭圆型 | 无实特征方向 | Laplace方程、Poisson方程 | 某点解受整个区域边界条件共同影响,体现全局耦合 |
1.4 偏微分方程的数学性质 ❷
对于一般二阶偏微分方程:
\[ a \frac{\partial^2 \phi}{\partial x^2}+ b \frac{\partial^2 \phi}{\partial x \partial y}+ c \frac{\partial^2 \phi}{\partial y^2}+ \text{(低阶项)} = 0 \]
\[ \Delta = b^2 - 4ac \]
- \(\Delta < 0\):椭圆型(elliptic)
- \(\Delta = 0\):抛物型(parabolic)
- \(\Delta > 0\):双曲型(hyperbolic)
1.4 偏微分方程的数学性质 ❸
特征值方法(Eigenvalue Method)
方程组 \[ a_1 \frac{\partial u}{\partial x} + b_1 \frac{\partial u}{\partial y}+ c_1 \frac{\partial v}{\partial x} + d_1 \frac{\partial v}{\partial y} = f_1 \]
\[ a_2 \frac{\partial u}{\partial x} + b_2 \frac{\partial u}{\partial y}+ c_2 \frac{\partial v}{\partial x} + d_2 \frac{\partial v}{\partial y} = f_2 \]
为简化分析,令\(f_1=f_2=0\),写为向量形式:
\[ [K]\frac{\partial W}{\partial x} + [M]\frac{\partial W}{\partial y} = 0 \]
其中:
- \([K], [M]\):\(2\times2\) 系数矩阵;\(W = \begin{bmatrix} u \\ v \end{bmatrix}\)
1.4 偏微分方程的数学性质 ❸
特征值方法(Eigenvalue Method)
左乘 \([K]^{-1}\),令 \([N] = [K]^{-1}[M]\)
\[ \frac{\partial W}{\partial x} + [N]\frac{\partial W}{\partial y} = 0 \]
👉 方程类型由矩阵 \(N\) 的特征值决定
\[ |N - \lambda I| = 0 \]
判定规则
(证明见 Whitham, Gerald Beresford. Linear and nonlinear waves. John Wiley & Sons, 2011.)
- 特征值不重根 → 双曲型
- 特征值实数域无解(全为复数) → 椭圆型
- 特征值重根 → 抛物型
1.4 偏微分方程的数学性质 ❹
特征线的意义
考虑一般形式的有两个自变量的拟线性方程,其分量形式为:
\[ b_{ij}\frac{\partial u_j}{\partial t}+ a_{ij}\frac{\partial u_j}{\partial x}= c_i, \quad \]
其中,\(t, x\) 可以是时间和空间变量,也可以是其他任意具有物理意义的自变量。
设 \((x,t)\) 平面上的曲线可表示为参数方程:
\[ \Gamma: \begin{cases} \displaystyle \frac{dx}{ds} = \lambda_x \\ \displaystyle \frac{dt}{ds} = \lambda_t \end{cases} \]
其中 \(s\) 为参数,\((\lambda_x,\lambda_t)\) 为曲线的切向量。只要 \(\lambda_x\) 和 \(\lambda_t\) 的比值一定,切线的方向就不会发生变化,曲线的形状也是确定的。
1.4 偏微分方程的数学性质 ❹
特征线的意义
任意物理量 \(\phi\) 沿曲线 \(\Gamma\) 的方向导数为:
\[ \frac{d\phi}{ds}= \frac{\partial \phi}{\partial t}\frac{dt}{ds}+ \frac{\partial \phi}{\partial x}\frac{dx}{ds}= \lambda_t \frac{\partial \phi}{\partial t}+ \lambda_x \frac{\partial \phi}{\partial x} \]
如果对于方程
\[ b_{ij}\frac{\partial u_j}{\partial t}+ a_{ij}\frac{\partial u_j}{\partial x}= c_i, \quad \]
选择合适的曲线 \(\Gamma\),使得方程可以变换为仅包含沿 \(\Gamma\) 的方向导数,则该曲线称为:
特征线(characteristic curve)
1.4 偏微分方程的数学性质 ❹
特征线的意义
对应的方程称为:
特征相容关系(characteristic compatibility equation)
示例:一维线性对流方程
\[ \frac{\partial u}{\partial t} + a \frac{\partial u}{\partial x} = 0 \]
沿 \(\Gamma\):
\[ \frac{du}{ds}= \lambda_t \frac{\partial u}{\partial t}+ \lambda_x \frac{\partial u}{\partial x} \]
1.4 偏微分方程的数学性质 ❹
特征线的意义
当取:
\[ \lambda_t = 1,\quad \lambda_x = a \]
得到:
\[ \frac{du}{ds} = 0 \]
原方程退化为常微分方程,称为特征线上的特征相容关系
同时,
\[ \frac{dx}{dt} = \frac{\lambda_x}{\lambda_t} = a \]
称为特征线
1.4 偏微分方程的数学性质 ❹
特征线的意义
沿特征线:
\[ u|_\Gamma = \text{const} \]
若初始条件为:
\[ u(x,0) = u_0(x) \]
我们可以导出 \(\frac{\partial u}{\partial t} + a \frac{\partial u}{\partial x} = 0\) 的解析解为
\[ u(x,t) = u_0(x - at) \]
- 从时空任一点出发都可以画出特征线
- 沿着特征线 \(\Gamma: \frac{dx}{dt} = \frac{\lambda_x}{\lambda_t} = a\)
- \(u|_\Gamma = \text{const}\) 函数值本身不变
- 只是在“平移”(它只是把初始条件“搬运”了一遍)
1.4 偏微分方程的数学性质 ❹
特征线的意义
🏷️ 若 \(a(x,t) = \text{const}\)
初始条件为:
\[ u(x,0) = \phi(x) \]
当 \(\phi(x)\) 为三角形分布,则: 在任意时刻 \(t\),解的幅值与形状保持不变,仅发生平移
🏷️ 若 \(a(x,t) \neq \text{const}\)
此时特征线发生弯曲,但:沿特征线传播过程中, 函数值仍保持不变
💻 代码演示 LinearTransport.m
1.4 偏微分方程的数学性质 ❺
示例:一维波动方程(\(u_{tt} = a^2 u_{xx}\))
\[ u_{tt} = a^2 u_{xx} \]
转化为一阶系统,引入变量:
\[ v = u_t, \quad w = u_x \]
则原方程可写为:
\[ \begin{cases} v_t = a^2 w_x \\ w_t = v_x \end{cases} \]
写成守恒形式:
\[ \mathbf{U}_t + A \mathbf{U}_x = 0 \]
1.4 偏微分方程的数学性质 ❺
示例:一维波动方程(\(u_{tt} = a^2 u_{xx}\))
\[ \mathbf{U}_t + A \mathbf{U}_x = 0 \]
其中:
\[ \mathbf{U} = \begin{bmatrix} v \\ w \end{bmatrix}, \qquad A = \begin{bmatrix} 0 & -a^2 \\ -1 & 0 \end{bmatrix} \]
求特征值:
\[ \det(A - \lambda I) = 0 \Longrightarrow \lambda^2 - a^2 = 0 \Longrightarrow \lambda_1 = a, \quad \lambda_2 = -a \]
👉 双曲型方程
1.4 偏微分方程的数学性质 ❺
示例:一维波动方程(\(u_{tt} = a^2 u_{xx}\))
考虑一维双曲型方程的一阶形式:
\[ \mathbf{U}_t + A \mathbf{U}_x = 0 \]
在 \(x\text{-}t\) 平面上取一条曲线 \(\Gamma\):
\[ \displaystyle \frac{dx}{ds} = \lambda_x, \quad \displaystyle \frac{dt}{ds} = \lambda_t, \quad \frac{dx}{dt} = \frac{\lambda_x}{\lambda_t} \]
沿该曲线的方向导数为(链式法则):
\[ \frac{d\mathbf{U}}{ds}=\frac{dt}{ds}\left(\mathbf{U}_t + \mathbf{U}_x\frac{dx}{dt}\right) \]
代入原方程
\[ \frac{d\mathbf{U}}{ds}=\frac{dt}{ds}\left(-A + \frac{dx}{dt} I\right)\mathbf{U}_x \]
1.4 偏微分方程的数学性质 ❺
示例:一维波动方程(\(u_{tt} = a^2 u_{xx}\))
特征线的意义:希望找到某条曲线,使得在这条曲线上,系统行为退化
设:
\[ \frac{dx}{dt} = \lambda \]
则有:
\[ \frac{d\mathbf{U}}{ds}=\frac{dt}{ds}(\lambda I - A)\mathbf{U}_x \]
若存在非零向量 \(\mathbf{r}\),满足:
\[ A \mathbf{r} = \lambda \mathbf{r} \]
则对于矩阵 \(A\), \(\lambda\) 为特征值,\(\mathbf{r}\) 为特征向量
1.4 偏微分方程的数学性质 ❺
示例:一维波动方程(\(u_{tt} = a^2 u_{xx}\))
投影到特征方向,定义标量:
\[ W = \mathbf{r}^T \mathbf{U} \]
沿曲线求导:
\[ \frac{dW}{ds}= \mathbf{r}^T \frac{d\mathbf{U}}{ds}= \mathbf{r}^T \frac{dt}{ds}(\lambda I - A)\mathbf{U}_x \]
利用:
\[ \mathbf{r}^T A = \lambda \mathbf{r}^T \]
得到:
\[ \frac{dW}{ds} = 0 \]
1.4 偏微分方程的数学性质 ❺
示例:一维波动方程(\(u_{tt} = a^2 u_{xx}\))
当且仅当:
\[ \frac{dx}{dt} = \lambda \]
时:
- 存在变量 \(W\)
- 在该曲线上保持不变
- 在特征线方向:系统退化为 ODE
1.4 偏微分方程的数学性质 ❺
示例:一维波动方程(\(u_{tt} = a^2 u_{xx}\))
\[ u_{tt} = a^2 u_{xx} \]
根据矩阵 \(A\) 的特征值分析,得到两族特征线:
\[ \frac{dx}{dt} = \pm a \]
积分:
\[ x - at = C_1, \quad x + at = C_2 \]
1.4 偏微分方程的数学性质 ❺
示例:一维波动方程(\(u_{tt} = a^2 u_{xx}\))
\[ u_{tt} = a^2 u_{xx} \qquad 若给定初始条件:\begin{cases} u(x,0) = f(x) \\ u_t(x,0) = g(x) \end{cases} \]
解析解(达朗贝尔解)
\[ u(x,t) = \frac{1}{2} \left[f(x+at) + f(x-at)\right]+ \frac{1}{2a} \int_{x-at}^{x+at} g(\tau)\, d\tau \]
表示:
- \(f(x-at)\):向右传播的波
- \(g(x+at)\):向左传播的波
👉 波形保持不变,只是平移
1.4 偏微分方程的数学性质 ❺
示例:一维波动方程(\(u_{tt} = a^2 u_{xx}\))
| 特征分析 | 解析解 |
|---|---|
| 特征线 \(x-at\) | 右行波 \(f(x-at)\) |
| 特征线 \(x+at\) | 左行波 \(g(x+at)\) |
👉 本质关系: 解析解 = 沿特征线传播的不变量叠加
回顾:变上、下限积分求导公式
\[ F(x)=\int_{\alpha(x)}^{\beta(x)} h(\tau)\,d\tau, \]
则有
\[ \frac{d}{dx}F(x)= h\bigl(\beta(x)\bigr)\beta'(x)- h\bigl(\alpha(x)\bigr)\alpha'(x). \]
1.4 偏微分方程的数学性质 ❺
示例:一维波动方程(\(u_{tt} = a^2 u_{xx}\))
记
\[ I(x,t)=\int_{x-at}^{x+at} g(\tau)\,d\tau. \]
则对 \(t\) 求导时,
\[ \frac{\partial I}{\partial t}= g(x+at)\cdot a - g(x-at)\cdot(-a)= a\,g(x+at)+a\,g(x-at). \]
对 \(x\) 求导时,
\[ \frac{\partial I}{\partial x}= g(x+at)\cdot 1 - g(x-at)\cdot 1= g(x+at)-g(x-at). \]
1.4 偏微分方程的数学性质 ❺
示例:一维波动方程(\(u_{tt} = a^2 u_{xx}\))
解析解(达朗贝尔解)验证:
\[ u(x,t) = \frac{1}{2} \left[f(x+at) + f(x-at)\right]+ \frac{1}{2a} \int_{x-at}^{x+at} g(\tau)\, d\tau \]
\[ u_t(x,t)= \frac{a}{2}f'(x+at)-\frac{a}{2}f'(x-at) +\frac{1}{2}\left[g(x+at)+g(x-at)\right]. \]
\[ u_{tt}(x,t)= \frac{a^2}{2}f''(x+at)+\frac{a^2}{2}f''(x-at) +\frac{a}{2}g'(x+at)-\frac{a}{2}g'(x-at). \]
\[ u_x(x,t)=\frac{1}{2}f'(x+at)+\frac{1}{2}f'(x-at) +\frac{1}{2a}[g(x+at)-g(x-at)]. \]
\[ u_{xx}(x,t)= \frac{1}{2}f''(x+at)+\frac{1}{2}f''(x-at) +\frac{1}{2a}[g'(x+at)-g'(x-at)]. \]
于是 \(a^2u_{xx}(x,t)=u_{tt}\)
1.4 偏微分方程的数学性质 ❺
示例:一维波动方程(\(u_{tt} = a^2 u_{xx}\))
第一项
\[ \frac{1}{2}[f(x+at)+f(x-at)] \]
表示初始位移 \(f(x)\) 分裂成两个波:
- 一个向右传播,一个向左传播;
- 解只与区间 \([x-at,\;x+at]\) 内的初始信息有关。
第二项:表示初始速度 \(g(x)\) 对后续解的贡献,在依赖域和影响域内发挥作用。 \[ \frac{1}{2a}\int_{x-at}^{x+at}g(\tau)\,d\tau \]
💻 代码演示 Wave1D.m
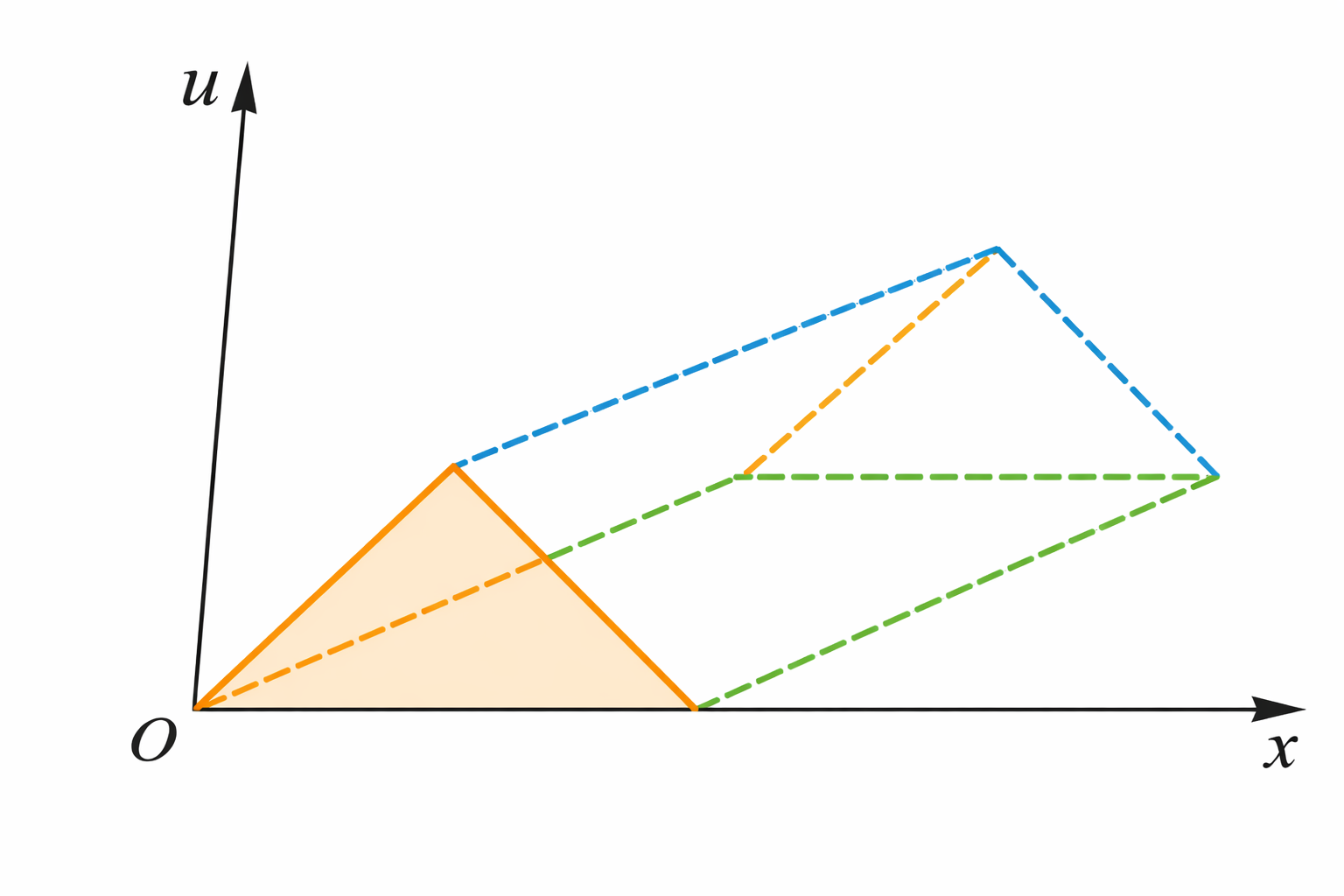
1.4 偏微分方程的数学性质 ❺
示例:一维波动方程(\(u_{tt} = a^2 u_{xx}\))
假设你站在图中的点 \(P\),面向 \(x\) 正方向:
- 向左转头看到的那条特征线 → 左行特征线
- 向右转头看到的那条特征线 → 右行特征线
这些特征线的一个重要意义在于:
👉 区域 I 被称为点 \(P\) 的影响域(Region of Influence)
- 如果在点 \(P\)
施加一个微小扰动
- 该扰动只会传播到图中区域 I 内的所有点
- 而不会影响区域 I 之外的区域
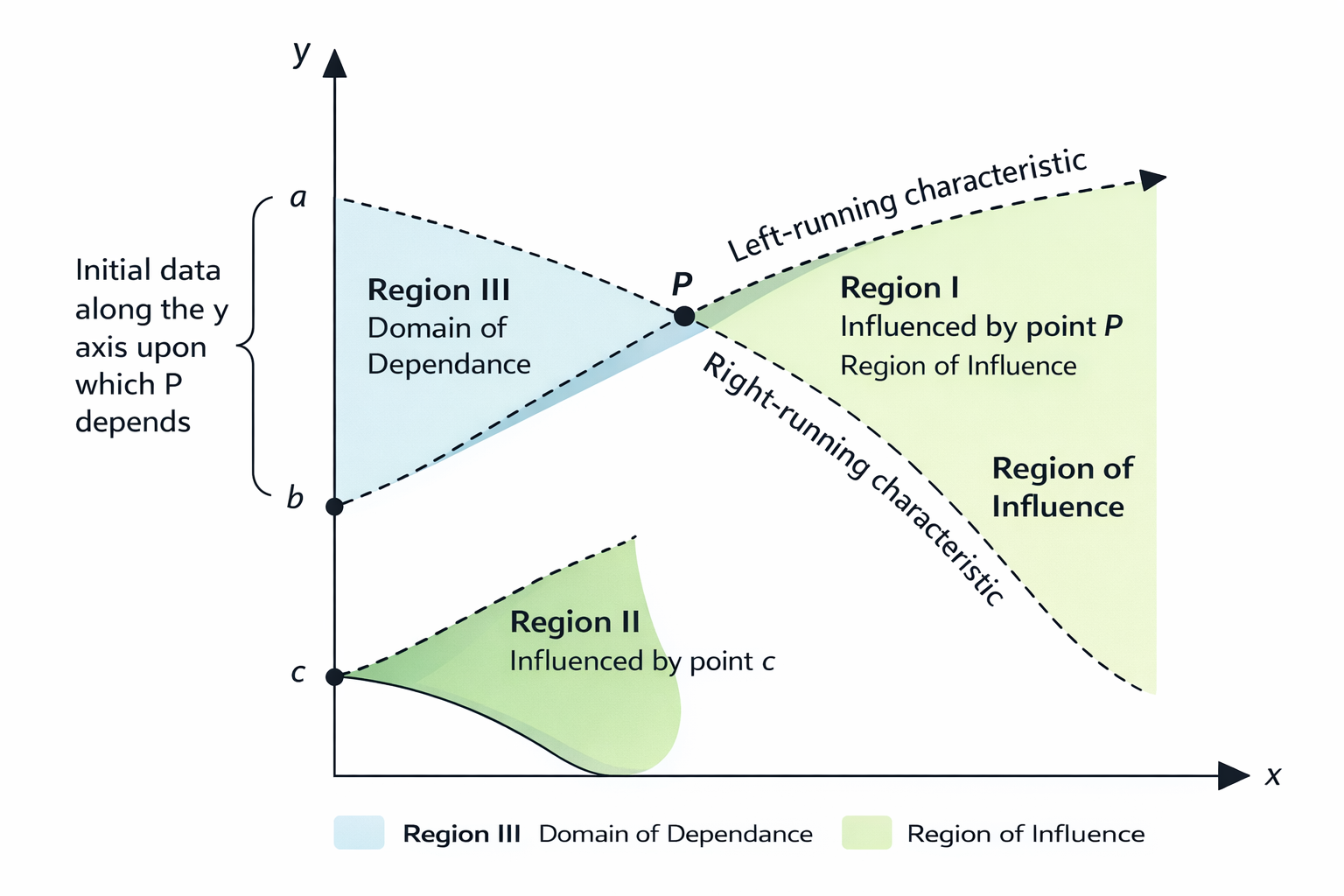
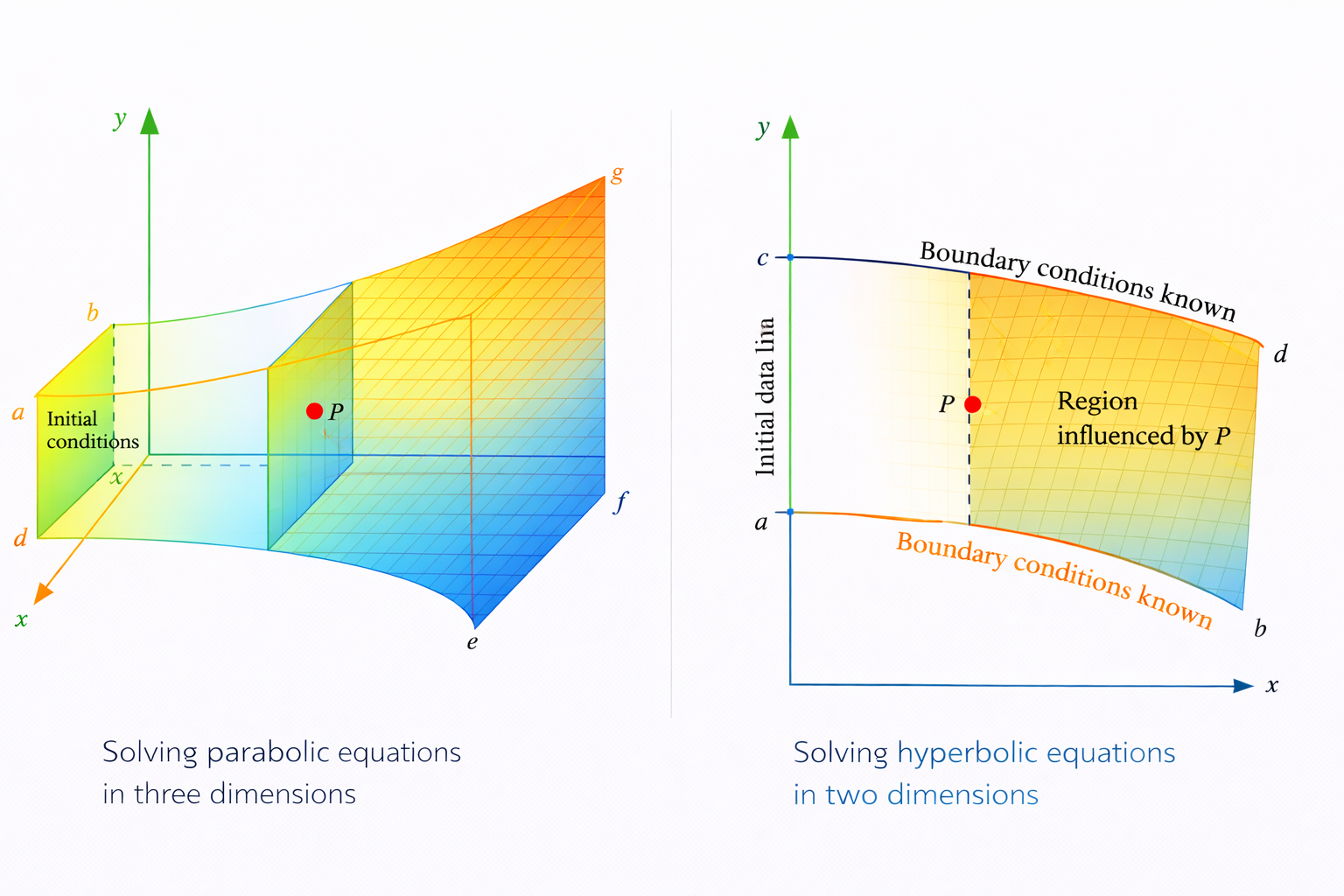
1.4 偏微分方程的数学性质 ❺
示例:一维波动方程(\(u_{tt} = a^2 u_{xx}\))
👉 区域 III 被称为点 \(P\) 的依赖域(Domain of Dependence)
现在将通过点 \(P\) 的两条特征线向后延伸,直到与 \(y\) 轴相交:
- 在 \(y\) 轴上截得区间 \(ab\)
- 在 \(y\) 轴(\(x=0\))上给定边界条件(如 \(u, v\) 已知),则可以从该边界出发,沿 \(x\) 方向逐步推进(marching)求解
👉 典型的双曲型方程
- 定常无粘超声速流动
- 非定常无粘流动(几乎等同于实际问题)
1.4 偏微分方程的数学性质 ❻
示例:一维热传导方程
\[ \frac{\partial u}{\partial t}=\gamma \frac{\partial^2 u}{\partial x^2},\qquad \gamma>0. \]
引入新变量
\[ g=\frac{\partial u}{\partial x}. \]
得到一阶方程组
\[ \begin{cases} \dfrac{\partial u}{\partial x}-g=0,\\[1.0ex] \dfrac{\partial g}{\partial x}-\dfrac{1}{\gamma}\dfrac{\partial u}{\partial t}=0. \end{cases} \]
1.4 偏微分方程的数学性质 ❻
示例:一维热传导方程
得到一阶方程组
\[ \begin{cases} \dfrac{\partial u}{\partial x}-g=0,\\[1.0ex] \dfrac{\partial g}{\partial x}-\dfrac{1}{\gamma}\dfrac{\partial u}{\partial t}=0. \end{cases} \]
把它写成矩阵形式:
\[ \frac{\partial}{\partial x}\begin{pmatrix}u\\g\end{pmatrix}+B\frac{\partial}{\partial t}\begin{pmatrix}u\\g\end{pmatrix}=\begin{pmatrix}g\\0\end{pmatrix}, \]
其中
\[ B= \begin{pmatrix} 0 & 0\\ -\dfrac{1}{\gamma} & 0 \end{pmatrix}. \]
1.4 偏微分方程的数学性质 ❻
示例:一维热传导方程
对于上述一阶系统,其特征方程为
\[ \left|\lambda I-B\right|=0. \]
代入矩阵 \(B\):
\[ \lambda I-B=\begin{pmatrix} \lambda & 0\\[0.5ex] \dfrac{1}{\gamma} & \lambda \end{pmatrix} \Longrightarrow \left|\lambda I-B\right|=\begin{vmatrix} \lambda & 0\\[0.5ex] \dfrac{1}{\gamma} & \lambda \end{vmatrix}=\lambda^2. \]
故特征值为
\[ \lambda_1=\lambda_2=0 \Rightarrow {\text{原方程为抛物型方程}} \]
💻 代码演示 Heat1D.m
1.4 偏微分方程的数学性质 ❻
抛物型方程
1.4 偏微分方程的数学性质 ❻
抛物型方程
一维热传导方程的解析解
\[ \frac{\partial u}{\partial t}=\gamma \frac{\partial^2 u}{\partial x^2}, \qquad \gamma>0, \qquad -\infty<x<\infty,\ t>0 \]
其中初始条件为
\[ u(x,0)=u_0(x) \]
解析解:
\[ u(x,t)=\int_{-\infty}^{\infty} \frac{1}{\sqrt{4\pi \gamma t}} \exp\left(-\frac{(x-\xi)^2}{4\gamma t}\right) u_0(\xi)\,d\xi \]
1.4 偏微分方程的数学性质 ❻
抛物型方程
\[ u(x,t)=\int_{-\infty}^{\infty} \frac{1}{\sqrt{4\pi \gamma t}} \exp\left(-\frac{(x-\xi)^2}{4\gamma t}\right) u_0(\xi)\,d\xi \]
该公式表明:
- 时刻 \(t\) 的温度 \(u(x,t)\) 由整个初始温度分布 \(u_0(\xi)\) 共同决定
- 距离 \(x\) 越近的初值点,对 \(u(x,t)\) 的贡献越大
- 距离越远,贡献越小,但不为零
因此,热传导方程的依赖域和影响域是整个空间 \(x\),而不是有限区间。
1.4 偏微分方程的数学性质 ❻
抛物型方程
若初始条件取为 Dirac 函数
\[ u(x,0)=\delta(x) \]
则解就是基本解本身:
\[ u(x,t)=\frac{1}{\sqrt{4\pi \gamma t}} \exp\left(-\frac{x^2}{4\gamma t}\right) \]
这表示热量从一点出发,随时间扩散成越来越宽、越来越平缓的高斯分布。
1.4 偏微分方程的数学性质 ❻
抛物型方程
若初始条件为
\[ u(x,0)=\sin(kx) \]
则解析解为
\[ u(x,t)=e^{-\gamma k^2 t}\sin(kx) \]
这个解说明:
- 空间形状保持为 \(\sin(kx)\),但振幅按指数规律衰减:
\[ e^{-\gamma k^2 t} \]
- 并且波数 \(k\) 越大,衰减越快。
- 热扩散会更快地抹平小尺度、高频率的温度起伏。
1.4 偏微分方程的数学性质 ❻
联想:瓷器的烧制
| 状态 | 微观结构 | 表面特性 |
|---|---|---|
| 瓷土 | 松散颗粒 + 孔隙 | 粗糙 |
| 烧结体 | 致密晶体结构 | 较平滑 |
| 上釉瓷器 | 玻璃态覆盖 | 非常光滑 |
瓷器之所以光滑,是因为在高温下经历了“熔融 + 流动 + 表面张力重排 + 冷却固化”的过程,本质上是材料在向“最低表面能状态”演化。
👉 这个过程可以类比:
- 热传导方程 → 抹平温度梯度
- 烧结过程 → 抹平几何粗糙度
👉 本质:
系统总是趋向更平滑、更均匀、更稳定的状态
1.4 偏微分方程的数学性质 ❻
1.4 偏微分方程的数学性质 ❼
示例:Laplace方程
对于二阶偏微分方程(组),可以通过降阶的方法,化为一阶拟线性方程组,再利用系数矩阵的特征值来判断方程性质。下面以二维 Laplace 方程为例说明。
\[ \frac{\partial^2 \Phi}{\partial x^2}+\frac{\partial^2 \Phi}{\partial y^2}=0. \]
令
\[ u=\frac{\partial \Phi}{\partial x}, \qquad v=\frac{\partial \Phi}{\partial y}. \]
则原方程可写为
\[ \begin{cases} \dfrac{\partial u}{\partial x}+\dfrac{\partial v}{\partial y}=0,\\[1.0ex] \dfrac{\partial v}{\partial x}-\dfrac{\partial u}{\partial y}=0. \end{cases} \]
1.4 偏微分方程的数学性质 ❼
示例:Laplace方程
令
\[ \mathbf{U}= \begin{pmatrix} u\\ v \end{pmatrix}, \qquad A= \begin{pmatrix} 0 & 1\\ -1 & 0 \end{pmatrix}. \]
则上述方程组可以写成矩阵形式
\[ \frac{\partial \mathbf{U}}{\partial x} + A\frac{\partial \mathbf{U}}{\partial y} =0. \]
现在考察矩阵 \(A\) 的特征值。由特征方程
\[ \det(A-\lambda I)=0 \]
可得
\[ \det\begin{pmatrix}-\lambda & 1\\-1 & -\lambda\end{pmatrix}=\lambda^2+1=0. \]
1.4 偏微分方程的数学性质 ❼
示例:Laplace方程
因此特征值为
\[ \lambda_{1,2}=\pm i. \]
根据特征值方法判定:特征值为复数,因此 Laplace 方程是 椭圆型方程。
评注
- 双曲型方程的一个重要特征是存在实特征方向,信息会沿某些真实方向传播,例如波动方程。
- 而 Laplace 方程对应的特征值是复数,说明它没有实特征线。这意味着它不是“传播型”问题,而更像一种“整体平衡型”问题:某一点的解会受到周围区域整体状态的共同影响。
- 这正是椭圆型方程的典型特征。无法推进求解,需整体求解。
💻 代码演示 Laplace.m
1.4 偏微分方程的数学性质 ❽
示例:二维无旋可压流
线性化后方程:
\[ (1 - M_\infty^2)\frac{\partial u'}{\partial x} + \frac{\partial v'}{\partial y} = 0 \]
\[ \frac{\partial u'}{\partial y} - \frac{\partial v'}{\partial x} = 0 \]
写成矩阵形式
\[ [K] = \begin{bmatrix} 1 - M_\infty^2 & 0 \\ 0 & -1 \end{bmatrix}, \quad [M] = \begin{bmatrix} 0 & 1 \\ 1 & 0 \end{bmatrix} \]
\[ [N] = [K]^{-1}[M] =\begin{bmatrix}0 & \frac{1}{1 - M_\infty^2} \\-1 & 0\end{bmatrix} \]
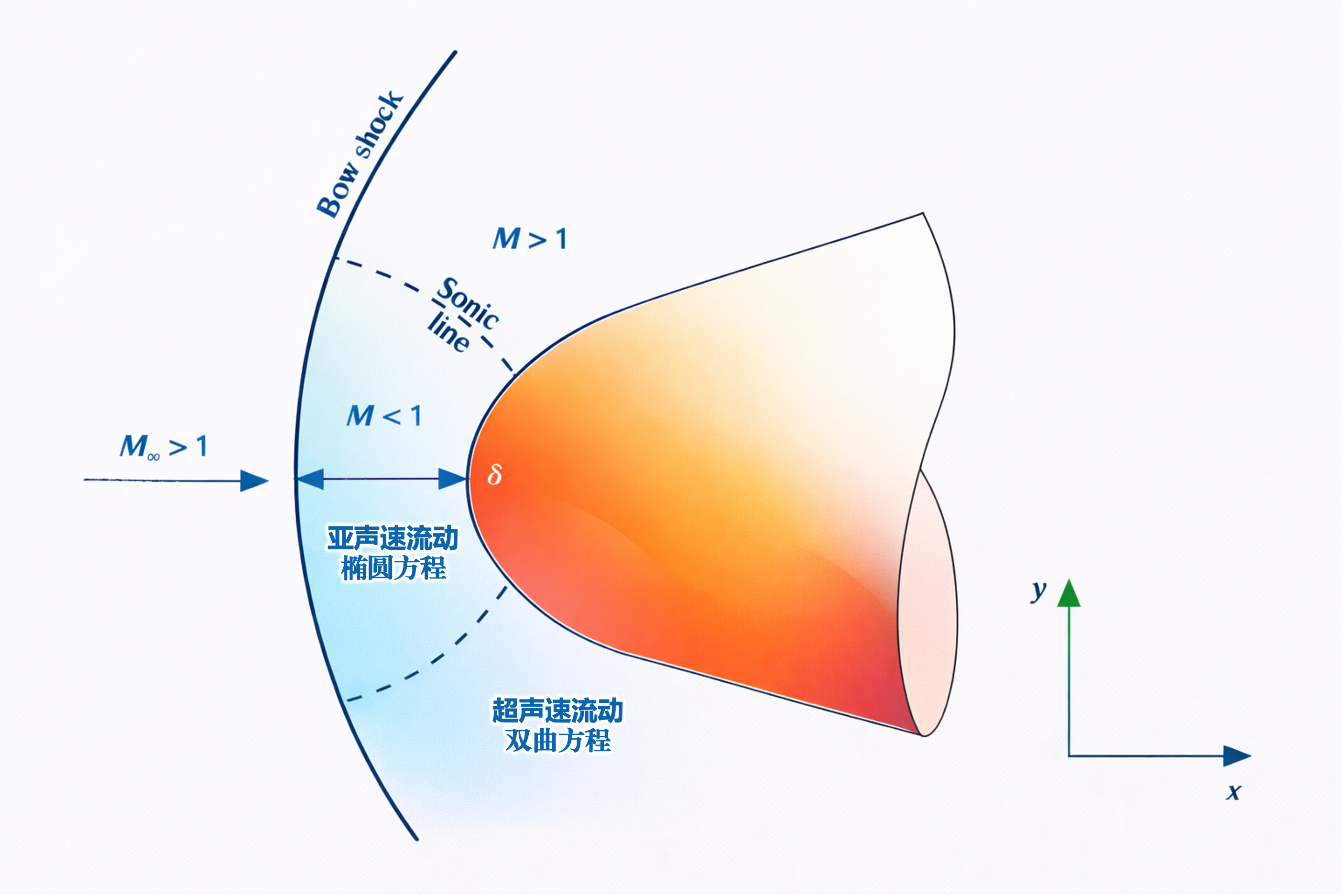
1.4 偏微分方程的数学性质 ❽
求特征值
\[ |[N] - \lambda [I]| = 0 \]
展开:
\[ \lambda^2 + \frac{1}{1 - M_\infty^2} = 0 \Rightarrow \lambda = \pm \frac{1}{\sqrt{M_\infty^2 - 1}} \]
- ✔ 超声速(\(M_\infty > 1\)):\(\lambda\) 为实数、两条特征线、👉 双曲型(Hyperbolic)
- ✔ 亚声速(\(M_\infty < 1\)):\(\lambda\) 为虚数、无实特征线、👉 椭圆型(Elliptic)
- 特征值 = 特征线斜率
- 流动类型由马赫数决定
- 超声速 → 信息沿特征线传播(有方向性)
- 亚声速 → 信息全局耦合
1.4 偏微分方程的数学性质 ❽
特征值方法总结
① 写成矩阵形式
② 构造 \([N] = [K]^{-1}[M]\)
③ 求特征值
④ 判定类型
评注
- 实际问题中: 特征值可能既有实数又有复数
- 此时系统呈现: 👉 混合型(Mixed type)
- 典型例子:跨声速流动(Transonic flow)
👉 结论:PDE 分类并非总是“纯类型”
1.4 偏微分方程的数学性质 ❾
示例:一维欧拉方程
\[ \frac{\partial \mathbf{U}}{\partial t}+\frac{\partial \mathbf{F}}{\partial x}=0. \]
其中守恒变量与通量分别为
\[ \mathbf{U}=\begin{pmatrix} \rho\\ \rho u\\ \rho E \end{pmatrix}, \qquad \mathbf{F}=\begin{pmatrix} \rho u\\ \rho u^2+p\\ (\rho E+p)u \end{pmatrix}. \]
- \(\rho\) 为密度;
- \(u\) 为速度;
- \(p\) 为压强;
- \(E\) 为总能;
1.4 偏微分方程的数学性质 ❾
示例:一维欧拉方程
由于通量 \(\mathbf{F}\) 是守恒变量 \(\mathbf{U}\) 的函数,即
\[ \mathbf{F}=\mathbf{F}(\mathbf{U}), \]
故由链式法则有
\[ \frac{\partial \mathbf{F}}{\partial x}=\frac{\partial \mathbf{F}}{\partial \mathbf{U}} \frac{\partial \mathbf{U}}{\partial x}. \]
记 Jacobi 矩阵
\[ A=\frac{\partial \mathbf{F}}{\partial \mathbf{U}}, \]
则 Euler 方程可写成拟线性形式
\[ \frac{\partial \mathbf{U}}{\partial t} + A\frac{\partial \mathbf{U}}{\partial x} =0. \]
这就是用特征值方法分析方程性质的标准出发点。
1.4 偏微分方程的数学性质 ❾
示例:一维欧拉方程
对理想气体状态方程,
\[ p=(\gamma-1)\left(\rho E-\frac{1}{2}\rho u^2\right), \]
可得到 Jacobi 矩阵
\[ A=\begin{pmatrix} 0 & 1 & 0\\[1ex] \dfrac{\gamma-3}{2}u^2 & (3-\gamma)u & \gamma-1\\[1ex] (\gamma-1)u^3-\gamma uE & \gamma E-\dfrac{3}{2}(\gamma-1)u^2 & \gamma u \end{pmatrix}. \]
1.4 偏微分方程的数学性质 ❾
示例:一维欧拉方程
特征值由特征方程
\[ |A-\lambda I|=0 \]
确定。
对上面的矩阵求解后,可以得到三个特征值:
\[ \lambda_1=u-a,\qquad \lambda_2=u,\qquad \lambda_3=u+a, \]
其中
\[ a=\sqrt{\frac{\gamma p}{\rho}} \]
为局部音速。
1.4 偏微分方程的数学性质 ❾
示例:一维欧拉方程
可以看到,一维 Euler 方程的三个特征值
\[ u-a,\qquad u,\qquad u+a \]
在物理上都是实数,只要
\[ \rho>0,\qquad p>0, \]
则音速 \(a\) 为实数,因此三个特征值都是实数。
并且在一般情形下,这三个特征值互不相同,因此矩阵 \(A\) 有三个线性无关特征向量。
这说明该方程组满足:
- 特征值全为实数;
- 有完整的特征向量组。
因此,一维 Euler 方程属于 双曲型方程组.
1.4 偏微分方程的数学性质 ❾
示例:一维欧拉方程
评注
这三个特征值分别对应三类扰动传播速度:
(1)\(\lambda_1=u-a\)
表示一个以相对流体速度 \(-a\) 传播的波,在固定坐标系中其传播速度为 \(u-a\) 对应左行声波。
(2)\(\lambda_2=u\)
表示与流体质点一起运动的扰动,传播速度就是流体本身速度 \(u\) 通常对应涡波或熵波。
(3)\(\lambda_3=u+a\)
表示一个以相对流体速度 \(+a\) 传播的波,在固定坐标系中其传播速度为 \(u+a\) 通常对应右行声波。
💻 代码演示 Euler_1D.m
1.4 偏微分方程的数学性质 ❿
示例:二维欧拉方程
以原始变量
\[ \mathbf W= \begin{pmatrix} \rho\\ u\\ v\\ p \end{pmatrix} \]
为未知量,二维非定常可压 Euler 方程可写成
\[ \frac{\partial \mathbf W}{\partial t} + A\frac{\partial \mathbf W}{\partial x} + B\frac{\partial \mathbf W}{\partial y} =0. \]
1.4 偏微分方程的数学性质 ❿
示例:二维欧拉方程
\[ \frac{\partial \mathbf W}{\partial t} + A\frac{\partial \mathbf W}{\partial x} + B\frac{\partial \mathbf W}{\partial y} =0. \]
其中
\[ A= \begin{pmatrix} u & \rho & 0 & 0\\ 0 & u & 0 & 1/\rho\\ 0 & 0 & u & 0\\ 0 & \gamma p & 0 & u \end{pmatrix}, \qquad B= \begin{pmatrix} v & 0 & \rho & 0\\ 0 & v & 0 & 0\\ 0 & 0 & v & 1/\rho\\ 0 & 0 & \gamma p & v \end{pmatrix}. \]
这里:
- \(\rho\) 为密度,\(u,v\) 分别为 \(x,y\) 方向速度,\(p\) 为压强,
- \(\gamma\) 为比热比,音速为 \(a=\sqrt{\frac{\gamma p}{\rho}}\)
1.4 偏微分方程的数学性质 ❿
示例:二维欧拉方程
为了分析 \(x\) 与 \(t\) 这两个自变量对应的方程性质,把关于 \(y\) 的项移到右端,当作“源项”处理,则有
\[ \frac{\partial \mathbf W}{\partial t}+ A\frac{\partial \mathbf W}{\partial x}= -\,B\frac{\partial \mathbf W}{\partial y}. \]
此时只需考察矩阵 \(A\) 的特征值。
特征方程为
\[ |A-\lambda I|=0. \]
求解可得 4 个特征值
\[ \lambda_1=u-a,\qquad \lambda_2=u,\qquad \lambda_3=u,\qquad \lambda_4=u+a. \]
1.4 偏微分方程的数学性质 ❿
示例:二维欧拉方程
由于
\[ a=\sqrt{\frac{\gamma p}{\rho}} \]
在物理上是实数,因此上述四个特征值全为实数。
而且矩阵 \(A\) 具有 4 个线性无关特征向量,所以在 \(x\!-\!t\) 平面上,二维非定常 Euler 方程是
双曲型
其特征方向对应为
- \(u-a\):左行声波,
- \(u\):两条重根,对应涡量/熵类扰动,
- \(u+a\):右行声波。
1.4 偏微分方程的数学性质 ❿
示例:二维欧拉方程
同理,把关于 \(x\) 的项移到右端,当作源项处理,则有
\[ \frac{\partial \mathbf W}{\partial t}+ B\frac{\partial \mathbf W}{\partial y}= -\,A\frac{\partial \mathbf W}{\partial x}. \]
这时只需考察矩阵 \(B\) 的特征值。特征方程为
\[ |B-\lambda I|=0. \]
求解可得
\[ \lambda_1=v-a,\qquad \lambda_2=v,\qquad \lambda_3=v,\qquad \lambda_4=v+a. \]
这些特征值同样都是实数,并且有完整特征向量组,因此在 \(y\!-\!t\) 平面上,二维非定常 Euler 方程也是双曲型
1.4 偏微分方程的数学性质 ❿
示例:二维欧拉方程
这说明二维非定常 Euler 方程在“时间—空间”平面中具有典型的传播型特征:
- 扰动不会瞬间传遍全场,
- 而是沿有限速度传播,
- 传播速度由特征值决定。
因此,它本质上描述的是波的传播问题,属于典型的双曲型方程组。
1.4 偏微分方程的数学性质 ❿
示例:二维欧拉方程
若略去时间导数项,就得到二维定常 Euler 方程
\[ A\frac{\partial \mathbf W}{\partial x} + B\frac{\partial \mathbf W}{\partial y} =0. \]
若 \(A\) 可逆,则可写成
\[ \frac{\partial \mathbf W}{\partial x} + C\frac{\partial \mathbf W}{\partial y} =0, \qquad C=A^{-1}B. \]
特征值满足
\[ |C-\lambda I|=0 \]
解得
\[ \lambda_{1,2}=\frac{v}{u},\qquad \lambda_{3,4}=\frac{uv\pm a\sqrt{u^2+v^2-a^2}}{u^2-a^2}. \]
1.4 偏微分方程的数学性质 ❿
示例:二维欧拉方程
\[ u^2+v^2>a^2 \quad\Longleftrightarrow\quad M>1 \]
\(\lambda_{3,4}\) 为实数,方程为双曲型;
\[ u^2+v^2<a^2 \quad\Longleftrightarrow\quad M<1 \]
\(\lambda_{3,4}\) 为共轭复数,方程为椭圆-双曲型;
\[ u^2+v^2=a^2 \quad\Longleftrightarrow\quad M=1 \]
出现重根,方程为抛物-双曲型。
因此,二维定常 Euler 方程是混合型方程。
👉 这一特点,给数值求解定常的 Euler 方程带来了很大困难,目前很少有人直接求解这种定常的 Euler 方程。
1.4 偏微分方程的数学性质 ⓫
为什么要区分方程类型?
👉 不同类型 PDE:
- 具有不同数学性质
- 对应不同物理行为
- 需要不同数值方法
关键概念
- Region of influence(影响域)
- Domain of dependence(依赖域)
1.4 偏微分方程的数学性质 ⓫
基本要求:Well-posed
定义:
- 解存在、唯一、对初始/边界条件连续依赖
- 👉 否则:数值解不稳定、无物理意义
✔ 示例:
- 超声速钝头体问题
- 👉 空间推进求解 → ill-posed
- 👉 时间推进求解 → well-posed
- 👉 空间推进求解 → ill-posed
第1章 基本方程及其性质 — 小结
如何把真实流动问题转化为可以计算的问题?
整体逻辑可以概括为三步:
物理建模
- 连续介质假设
- 牛顿流体假设(Stokes 假设)
控制方程建立
- 质量守恒(连续方程)
- 动量守恒(Navier–Stokes)
- 能量守恒(Energy)
第1章 基本方程及其性质 — 小结
数值求解框架
\[ \frac{\partial \mathbf{U}}{\partial t} + \nabla \cdot \mathbf{F} = \nabla \cdot \mathbf{F}_v + \mathbf{S} \]
CFD的标准流程:
- 建立物理模型
- 写出控制方程
- 给定初始/边界条件
- 数值离散
- 求解代数方程组
- 结果分析与验证
第1章 基本方程及其性质 — 小结
PDE类型
方程类型 = 信息传播方式
三类方程对比
| 类型 | 特征值 | 特征线 | 物理意义 |
|---|---|---|---|
| 双曲型 | 实数 | 存在 | 波传播 |
| 抛物型 | 重根 | 单方向 | 扩散 |
| 椭圆型 | 复数 | 无 | 全局耦合 |
不应不同的数值方法和初边值条件!
第1章 基本方程及其性质 - 本章作业
📘 作业:一维 Euler 方程类型分析
针对基本方程
\[ \frac{\partial \mathbf{U}}{\partial t}+\frac{\partial \mathbf{F}}{\partial x}=0 \]
\[ \mathbf{U}= \begin{pmatrix} \rho\\ \rho u\\ \rho E \end{pmatrix}, \qquad \mathbf{F}= \begin{pmatrix} \rho u\\ \rho u^2+p\\ (\rho E+p)u \end{pmatrix} \]
\[ p=(\gamma-1)\left(\rho E-\frac{1}{2}\rho u^2\right) \]
通过推导并分析 Jacobi 矩阵 \(A\) 判断方程类型(椭圆 / 抛物 / 双曲)
\[ A=\frac{\partial \mathbf{F}}{\partial \mathbf{U}} \]
提交时间:4月27日(课代表收齐后统一提交)